
TF5110 | TwinCAT 3 Kinematic Transformation L1

TF5110 | TwinCAT 3 Kinematic Transformation L1

使用 TwinCAT Kinematic Transformation 可以实现各种类型的机器人运动学。既可以使用 DIN 66025 指令,也可以使用符合 PLCopen 标准的 PLC 功能块,在笛卡尔坐标系中实现机器人运动的编程。集成的动态预控制确保运动在高加速度和高速情况下仍能够保持高精度。配置工作在 TwinCAT 3 开发环境中完成。
功能特点
- 支持各种并联机器人和串联机器人运动学,如取放任务
- 支持用 G 代码 (DIN 66025) 编程插补运动
- 此外,还可实现标准的 PTP 和电子凸轮应用
- 在笛卡尔坐标系中轻松实现编程
- 自动计算相关电机位置的反向运动
- 在 TwinCAT 3 开发环境中配置运动:除了设置机器人类型(如 Delta)之外,还必须设置机械臂长度和偏移量等参数
- 可为动态预控制指定负载质量和惯量
- 针对倍福伺服驱动器进行了优化
- 基本软件包集成了下列运动学:直角坐标运动
- 用户可以使用 C++ 实现和集成自己的运动学。
产品状态:
正常供应
产品信息
| 技术数据 | TF5110 |
|---|---|
| 要求 | TC1260 |
| 包括 | TF5440 |
| Included in | TF5111, TF5112, TF5113 |
| 操作系统 | Windows 10 |
| CPU 结构 | x64 |
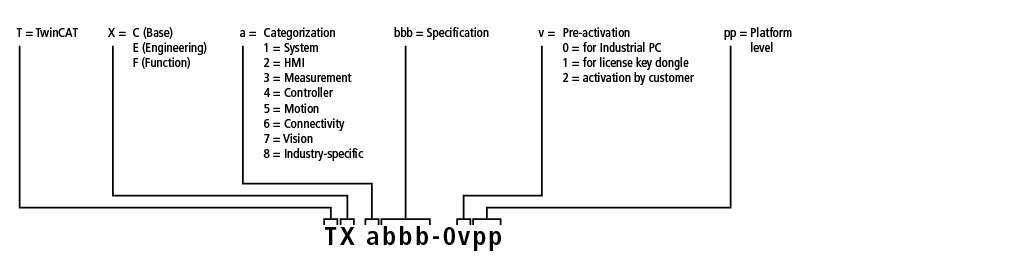
| 订购信息 | |
|---|---|
| TF5110-0v40 | TwinCAT 3 Kinematic Transformation L1,平台等级 40(普通型) |
| TF5110-0v50 | TwinCAT 3 Kinematic Transformation L1,平台等级 50(普通增强型) |
| TF5110-0v60 | TwinCAT 3 Kinematic Transformation L1,平台等级 60(中等性能型) |
| TF5110-0v70 | TwinCAT 3 Kinematic Transformation L1,平台等级 70(高性能型) |
| TF5110-0v80 | TwinCAT 3 Kinematic Transformation L1,平台等级 80(极高性能型) |
| TF5110-0v81 | TwinCAT 3 Kinematic Transformation L1,平台等级 81(极高性能型) |
| TF5110-0v82 | TwinCAT 3 Kinematic Transformation L1,平台等级 82(极高性能型) |
| TF5110-0v83 | TwinCAT 3 Kinematic Transformation L1,平台等级 83(极高性能型) |
| TF5110-0v84 | TwinCAT 3 Kinematic Transformation L1,平台等级 84(极高性能型) |
| TF5110-0v90 | TwinCAT 3 Kinematic Transformation L1,平台等级 90(其它) |
| TF5110-0v91 | TwinCAT 3 Kinematic Transformation L1,平台等级 91(其它,5…8 个处理器核) |
| TF5110-0v92 | TwinCAT 3 Kinematic Transformation L1,平台等级 92(其它,9…16 个处理器核) |
| TF5110-0v93 | TwinCAT 3 Kinematic Transformation L1,平台等级 93(其它,17…32 个处理器核) |
| TF5110-0v94 | TwinCAT 3 Kinematic Transformation L1,平台等级 94(其它,33…64 个处理器核) |
对于平台等级 90-94,我们推荐使用 TwinCAT 3 授权加密狗。
正在加载页面内容…请稍候
正在加载页面内容…请稍候
正在加载页面内容…请稍候
正在加载页面内容…请稍候
正在加载页面内容…请稍候
© Beckhoff Automation 2025 - 使用条款