
TF5420 | TwinCAT 3 Motion Pick-and-Place

TF5420 | TwinCAT 3 Motion Pick-and-Place

TwinCAT 3 Motion Pick-and-Place 是 TwinCAT 3 NC I (TF5100) 的扩展包,专为龙门式机器人实现搬运任务和其它运动学而设计。为混合执行运动指令将采用特殊方法,这有助在处理任务时优化循环时间。并可减少沿着轨迹的运动碰撞,从而更顺畅地运行,这对于高循环时间、机器人的轻柔操作和产品的精细搬运来说至关重要。
TF5420 的编程是通过 PLC 功能库完成的。对于拾放组中的轴数量没有限制,唯一的限制因素是控制器的处理能力。在给予适当处理能力的条件下,甚至可以为具有超过 3 根或 8 根轴的复杂机器处理插补运动指令(3 根轨迹轴加上 5 根辅助轴)。
从 V3.2.27 版本 开始,坐标和路径的动态参数可以单独配置。Tc3_Physics 功能库用于实现此目的。TF5420 中包含了 Tc3_Physics 功能库的 TF5440 授权。
产品状态:
正常供应
产品信息
| 技术数据 | TF5420 |
|---|---|
| 要求 | TC1260 |
| 操作系统 | Windows 10, Windows 11 |
| CPU 结构 | x64 |
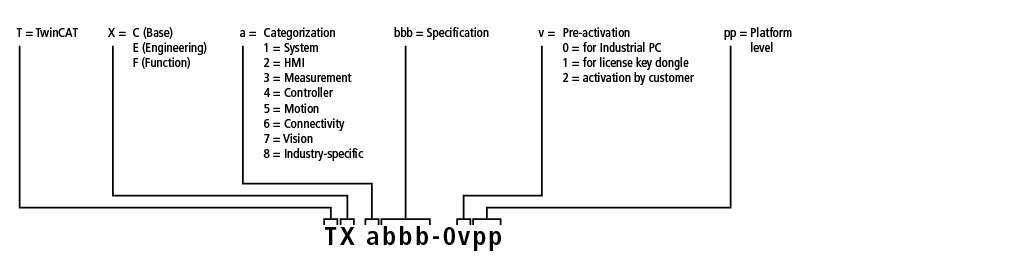
| 订购信息 | |
|---|---|
| TF5420-0v40 | TwinCAT 3 Motion Pick-and-Place,平台等级 40(普通型) |
| TF5420-0v50 | TwinCAT 3 Motion Pick-and-Place,平台等级 50(普通增强型) |
| TF5420-0v60 | TwinCAT 3 Motion Pick-and-Place,平台等级 60(中等性能型) |
| TF5420-0v70 | TwinCAT 3 Motion Pick-and-Place,平台等级 70(高性能型) |
| TF5420-0v80 | TwinCAT 3 Motion Pick-and-Place,平台等级 80(极高性能型) |
| TF5420-0v81 | TwinCAT 3 Motion Pick-and-Place,平台等级 81(极高性能型) |
| TF5420-0v82 | TwinCAT 3 Motion Pick-and-Place,平台等级 82(极高性能型) |
| TF5420-0v83 | TwinCAT 3 Motion Pick-and-Place,平台等级 83(极高性能型) |
| TF5420-0v84 | TwinCAT 3 Motion Pick-and-Place,平台等级 84(极高性能型) |
| TF5420-0v90 | TwinCAT 3 Motion Pick-and-Place,平台等级 90(其它) |
| TF5420-0v91 | TwinCAT 3 Motion Pick-and-Place,平台等级 91(其它,5…8 个处理器核) |
| TF5420-0v92 | TwinCAT 3 Motion Pick-and-Place,平台等级 92(其它,9…16 个处理器核) |
| TF5420-0v93 | TwinCAT 3 Motion Pick-and-Place,平台等级 93(其它,17…32 个处理器核) |
| TF5420-0v94 | TwinCAT 3 Motion Pick-and-Place,平台等级 94(其它,33…64 个处理器核) |
对于平台等级 90-94,我们推荐使用 TwinCAT 3 授权加密狗。
正在加载页面内容…请稍候
正在加载页面内容…请稍候
正在加载页面内容…请稍候
© Beckhoff Automation 2025 - 使用条款