TwinCAT Vision
Integrating machine vision into automation technology
Siège social Suisse
Beckhoff Automation AG
Integrating machine vision into automation technology




PC-based control specialist Beckhoff has expanded its established, highly successful TwinCAT product range to include TwinCAT Vision, an integrated image processing solution. This addition underscores the increasing importance of image processing as a quality factor across mechanical engineering, particularly in applications like Industrie 4.0, quality optimization and track-and-trace. On the software side, TwinCAT Vision expands the range of vision hardware to a complete solution for industrial image processing.
PC-based control offers an ideal solution here: TwinCAT Vision adds image processing to a universal control platform that incorporates PLC, motion control, robotics, high-end measurement technology, IoT and HMI. This simplifies engineering significantly because configuration and programming tasks are performed in the familiar PLC environment. In addition, all control functions related to image processing can be synchronized in the runtime system precisely, in real time. Latency is eliminated, and the image processing algorithms are executed in real time. This marks a major advance in quality compared to conventional machine vision solutions. With TwinCAT Vision, machine builders can fully integrate image processing tasks into the central control system, paving the way for more advanced machine designs that are capable of satisfying tomorrow’s marketplace demands,and offer enhanced competitiveness and investment security.

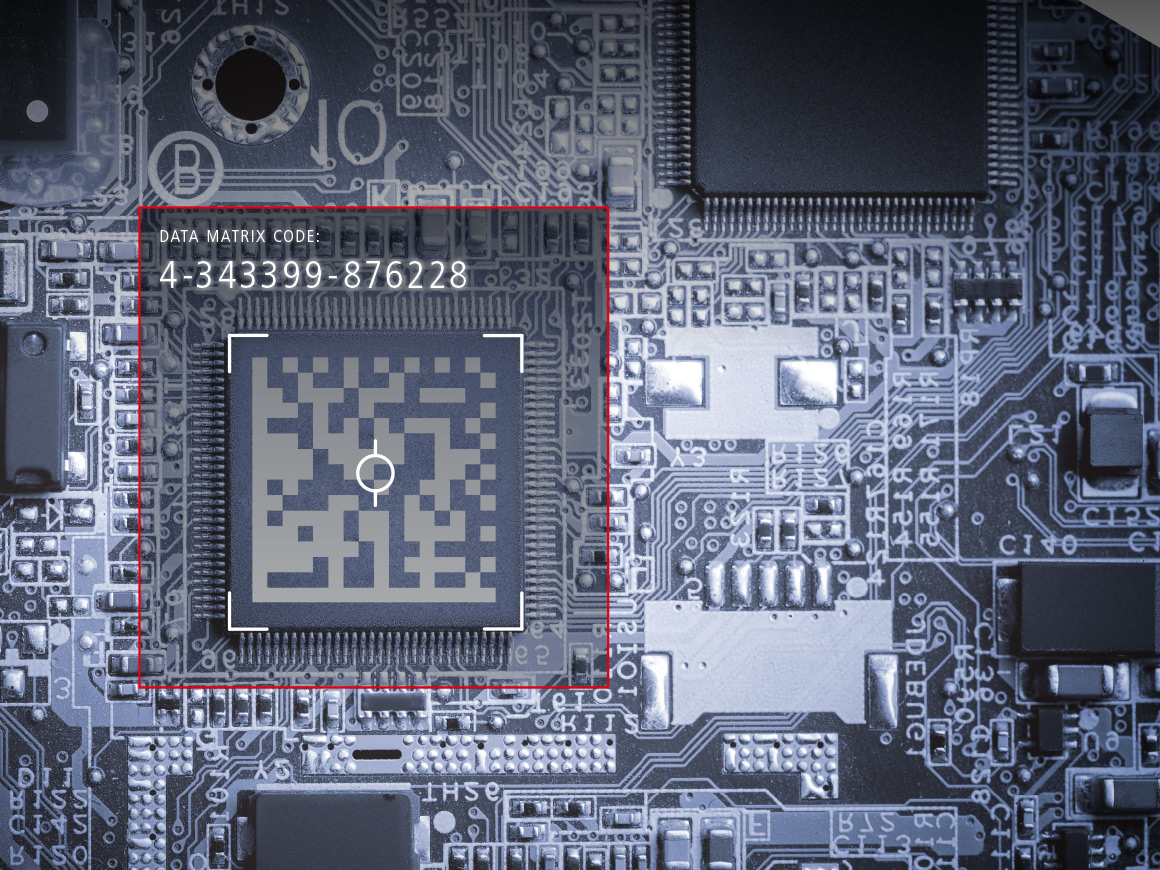
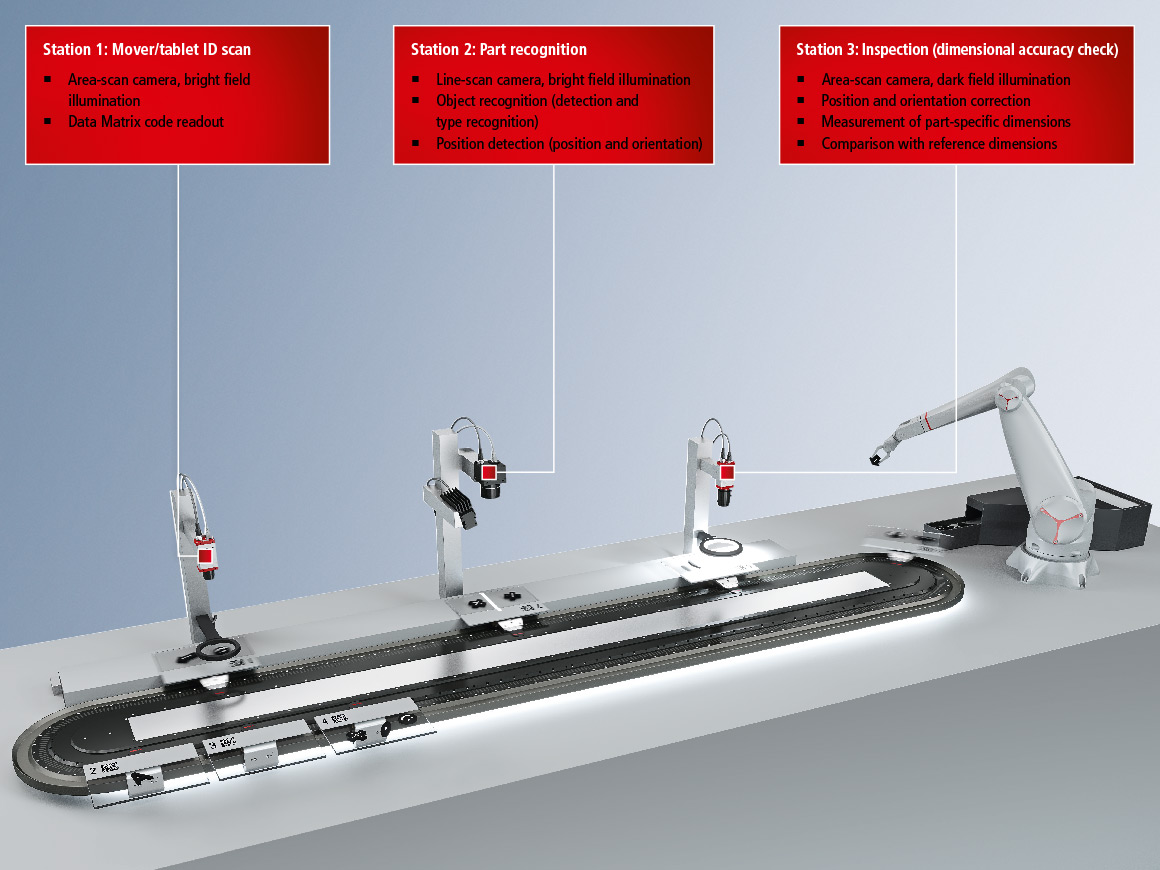
Identification

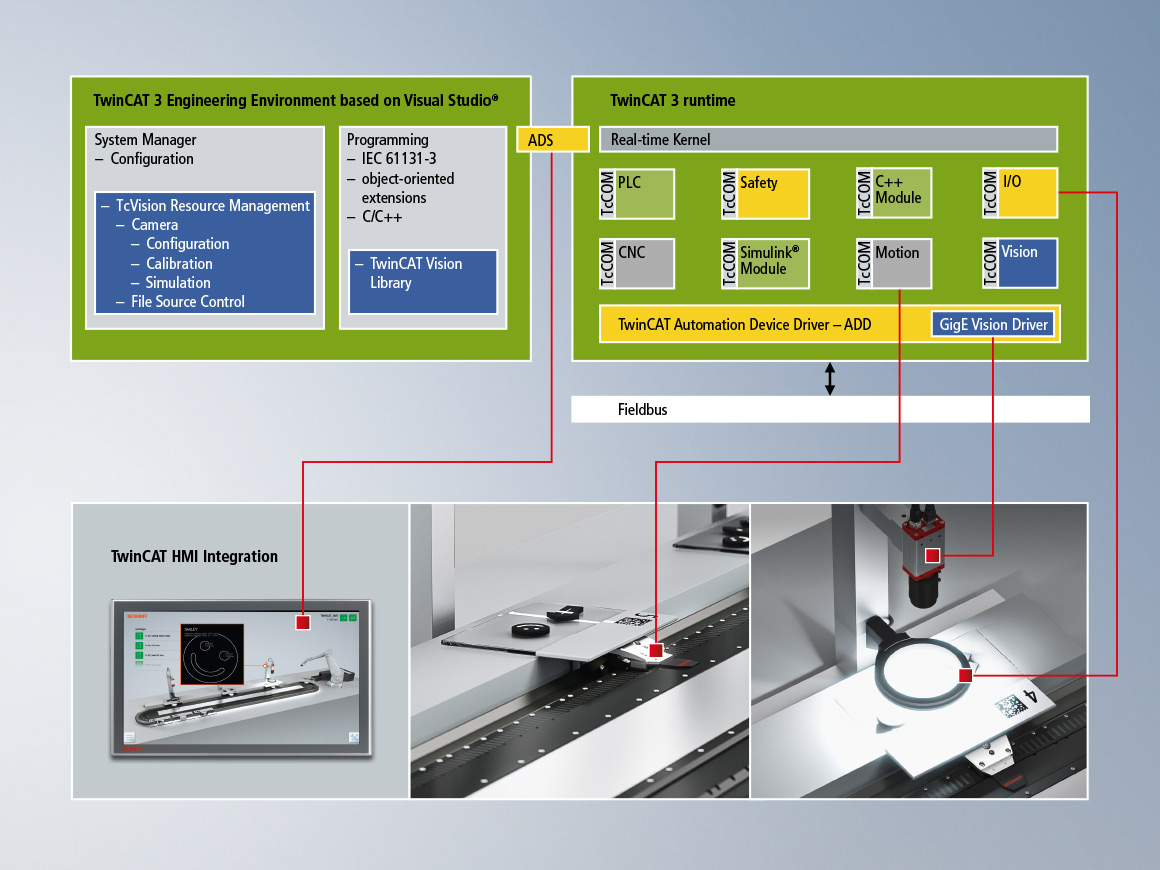
TwinCAT Vision is directly integrated into theTwinCAT Engineering environment. Cameras can be added and configured easily under the new Vision node, and can be calibrated there as well. A camera image stream can be captured and fed into the recording, instead of live camera images. Alternatively, images in a range of formats can be loaded. This means that, even without camera access, users can still develop and implement image processing procedures. The sequence of image processing is programmed directly in the PLC, in PLC programming languages and using the extensive library of image processing algorithms provided. Integrating image processing into the PLC means that the analysis chain is performed in the TwinCAT runtime system, enabling communication with other processes running on the PLC, such as motion control, without latency. All of the familiar debugging options from PLC programming are available. Intermediate results can be displayed in the engineering environment or in TwinCAT HMI at any time.
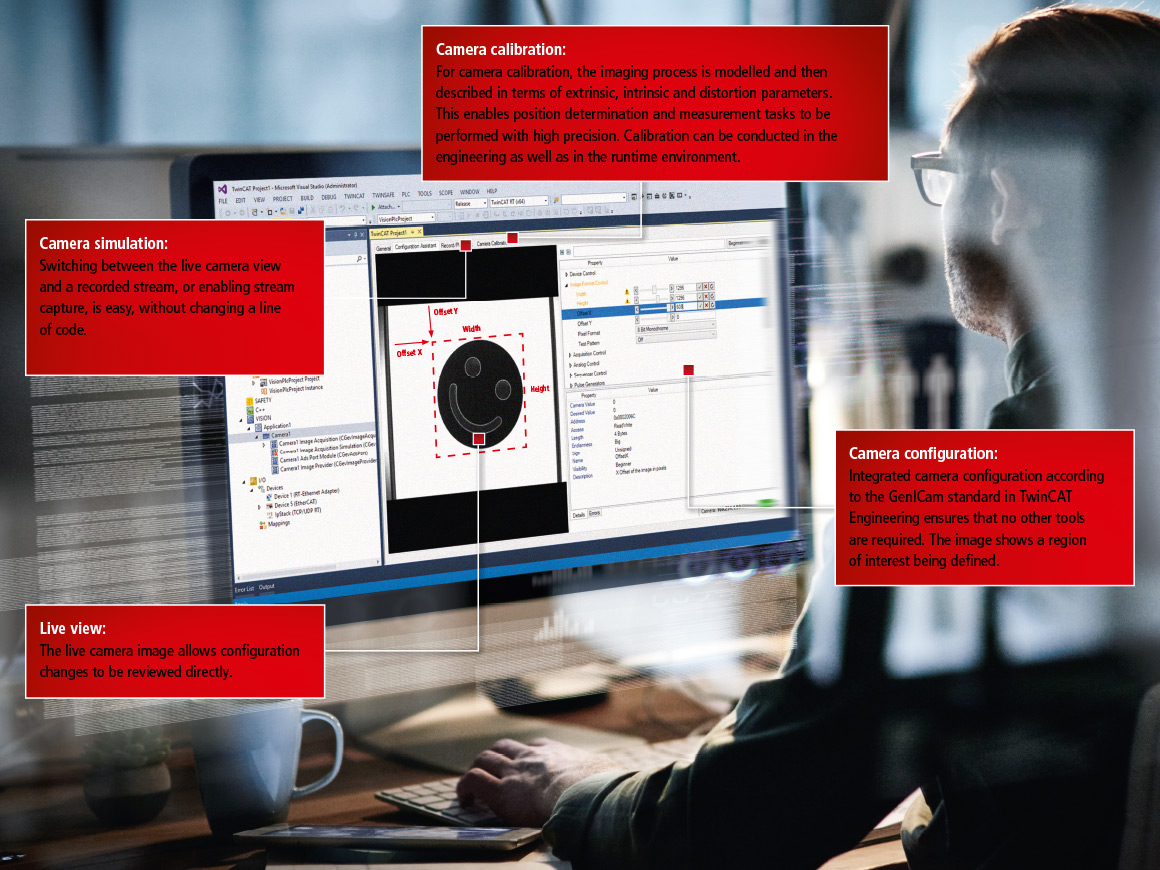
Apart from motion control and I/O configuration, TwinCAT Vision also enables cameras to be configured in TwinCAT Engineering. GigE Vision cameras can be integrated under the new TwinCAT Vision node and configured according to the GenICam standard. Here, all camera settings can be defined and the results can be directly reviewed in the camera live image. Moreover, cameras can also be calibrated in the engineering environment. Users can choose from a range of calibration patterns, including their own user-specific patterns. Again, they can review the results directly. TwinCAT Vision is fully integrated with TwinCAT and Visual Studio®. All known features such as docking windows and source code management systems are supported.
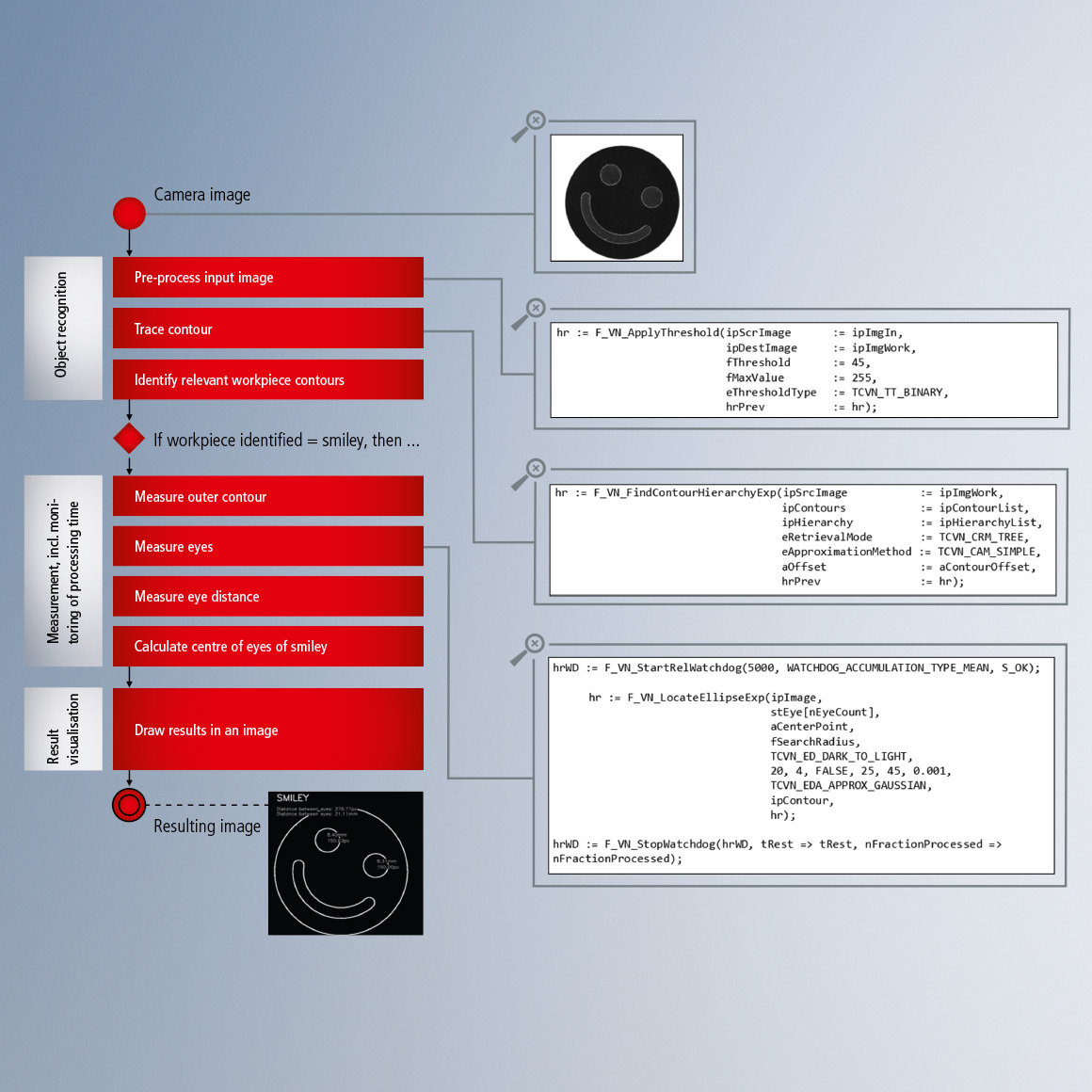
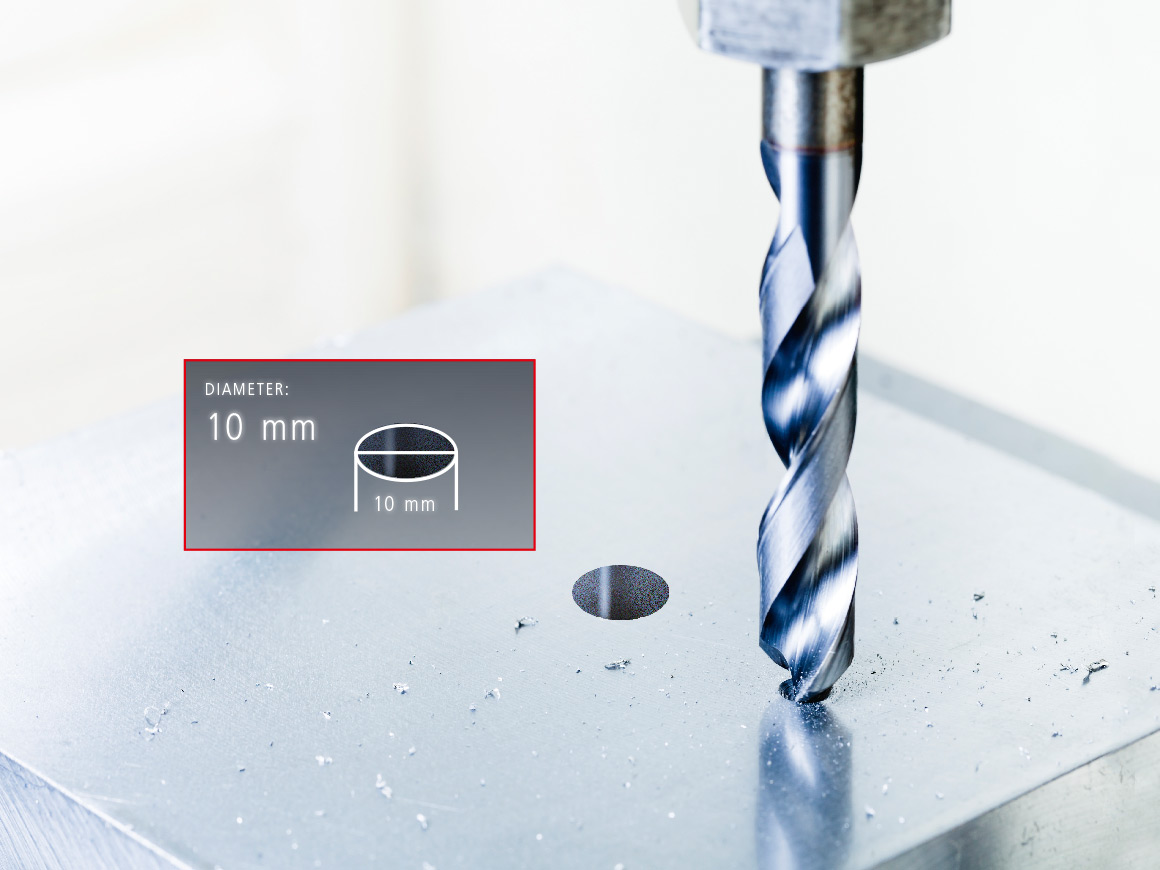
Image analysis is programmed in the PLC itself. An extensive library of function blocks and functions is available that includes contour detection, color recognition, key-point feature extraction and measurement functions. Additional information such as embedded lines or text can be inserted into images in the PLC. The intermediate status at any point along the analysis chain can be viewed as an image in the engineering environment or the TwinCAT HMI. Users can also work with the usual debug options supported by the PLC (to monitor variables and set breakpoints, for instance) and make online changes to the code in image processing algorithms.
Because the image processing algorithms are executed within in the same environment as PLC,motion control and robotics, all tasks can be easily synchronized. Image capture timing is defined precisely – using triggers, for instance – and is easy to coordinate with the position of an axis or robot at a given point in time. Integration of image processing into TwinCAT also simplifies the engineering process. A single tool can be used to configure and program all tasks with ease. Integration also enables machine builders to keep their image processing expertise in house. Since all image processing algorithms are executed in the same runtime and in a synchronized manner, delays that would otherwise occur in communication can be completely eliminated. Overall, these enhancements enable substantial process optimizations.

Robust cameras with highly flexible mounting options and a bandwidth of up to 2.5 Gbit/s offer a range of services tailored to industrial PCs.

Start industrial image processing immediately with the Vision Unit Illuminated (VUI)