

Motion control is firmly established as an essential component of TwinCAT and is successfully used in many projects across a wide range of industries. TwinCAT MC3 represents the next generation of motion control. All the highlights of the previous TwinCAT NC2 motion control solution can also be found in the latest generation of TwinCAT MC3.
The most important TwinCAT MC3 features are:
- complete system integration
- scalable performance
- hardware independence
- support for fluid power (hydraulics)
A further highlight is that there is no longer a fixed limit on the number of programmable axes in the new generation. These impressive features make TwinCAT MC3 a high-performance tool in the field of motion software solutions.
Advantages of TwinCAT MC3

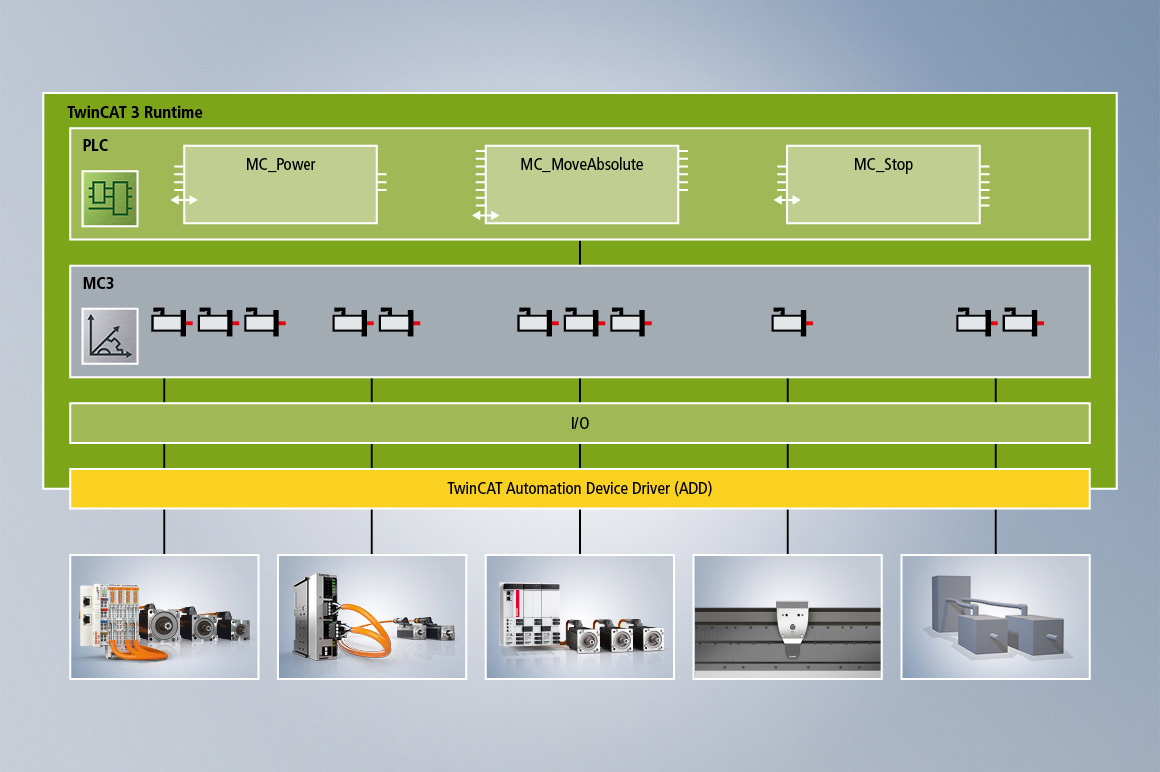
TwinCAT MC3 is seamlessly integrated into the TwinCAT system, which means that this motion control solution can be operated in parallel with the other TwinCAT functions in one system and can also interact with the other TwinCAT functions.
Notable highlights are as follows:
- TwinCAT MC3 can be operated in parallel with the previous NC2 motion control solution.
- The TE5950 TwinCAT 3 Drive Manager 2 supports commissioning of Beckhoff drive solutions and, just like NC2, can also automatically create MC3 configurations and MC3 axes with standard parameters. In combination with TE5960 TwinCAT 3 Autotuning, the parameters can also be adapted to the application at the push of a button.
- TwinCAT Scope is a powerful diagnostic tool that can be used to record movements and dynamics and then analyze them manually using various toolboxes. Since the software is fully compatible with TwinCAT MC3, thepositions and movements of MC3 axes can be recorded, the information can be displayed in YT charts, and the data can be analyzed.


TwinCAT MC3 has a new modular architecture, which maximizes the utilization of the control computer’s CPU performance through its comprehensive multi-core and multi-task support:
Multi-core support
TwinCAT MC3 can be distributed to several CPU cores as required. Movements can be synchronized across all CPU cores in use.
Multi-task support
Axes with different cycle times can be operated on a single CPU core, precisely matching the speeds and tasks of the respective axes. This facilitates optimum utilization of a CPU core, as the fastest axis does not necessarily dictate the clock rate for all axes. The axes of a conveyor belt with a delta picker can thus be operated at a cycle time of 1 ms to ensure that the workpieces are picked up quickly, while the axes for width adjustment of the conveyor belt are operated at a cycle time of 4 ms on the same CPU core.
As with the previous motion control solution, TwinCAT MC3 abstracts the axes into axis objects that separate the hardware from the programming process. This creates hardware independence, the advantages of which can be seen in the following properties:
Independence through axis simulation
Axes can be simulated, with the option to incorporate a combination of real and simulated axes within a project. Switching between the real and simulated axis can be carried out in the configuration with a single click, for both an individual axis and a group of axes. This allows the axes to be programmed without a connection to the hardware and reduces the commissioning time on the real machine.
Independence from the drive system
A wide variety of drive systems, such as servo, stepper, and DC motors, as well as the XTS product transport system, are equally abstracted into axis objects to assure uniform programming. Programming is facilitated by the TwinCAT Tc3_Mc3 library, which offers PLCopen-compliant function blocks that users may recognize from NC2. With TwinCAT MC3, hydraulic axes are now also supported and fully integrated. General programming is carried out using the same PLCopen-compliant function blocks that are used for electric axes. There is also a library with supplementary function blocks for special fluid power functionalities.
Free choice of bus system
TwinCAT is an open control platform that supports the EtherCAT high-performance communication system as well as all other common fieldbus systems.


With TwinCAT MC3, the hydraulics are fully integrated into the TwinCAT environment. TwinCAT MC3 Fluid Power offers manufacturer-independent control of position, speed, and pressure/force. Three drive technologies are supported:
- valve-regulated drives
- pump-controlled drives
- variable-speed drives
MC3 Fluid Power ensures equally deep integration of electrical and hydraulic axes and enables seamless interaction, precise synchronization, and flexible integration across different hardware platforms. With the scalable platform from Beckhoff, TwinCAT MC3 Fluid Power can be used for a wide range of applications, from isolated hydraulic solutions to complete machine control systems.
TwinCAT MC3 Fluid Power simplifies commissioning through the use of hydraulics-specific input parameters, such as cylinder design and pressure sensors, to directly calculate the cylinder force. The library contains an integrated filter function and supports various position encoders (such as EtherCAT, SSI, EnDat®, analog). It also monitors soft limits and tracking errors to ensure reliable operation. A hydraulically optimized control loop with integrated valve characteristics recording further improves accuracy and control stability.
Products

TF5500 | TwinCAT 3 MC3 Base
TwinCAT MC3 represents the next generation of motion control, combining the proven capabilities of TF5000 TwinCAT 3 NC PTP with major enhancements designed to boost performance and flexibility. Powered by TF5500 TwinCAT 3 MC3 Base, this new motion control system integrates seamlessly into TwinCAT to deliver an efficient, end-to-end automation solution.
TF551x | TwinCAT 3 MC3 Axes Packs
TwinCAT 3 MC3 Axes Packs expand TF5500 TwinCAT 3 MC3 Base with additional axis licenses.
TF553x | TwinCAT 3 MC3 Multi Vendor Packs
In addition to the control of Beckhoff axes, TwinCAT 3 MC3 also supports the control of axes from other manufacturers;
TF5550 | TwinCAT 3 MC3 Camming
TwinCAT 3 MC3 Camming extends TF5500 TwinCAT 3 MC3 Base with non-linear couplings (cam plates) between axes.

TF5560 | TwinCAT 3 MC3 Fluid Power
TwinCAT 3 MC3 Fluid Power expands TF5500 TwinCAT 3 MC3 Base with complete hydraulic integration in TwinCAT. It offers manufacturer-independent control of position, speed, and pressure/force.