
EP7041-1002 | EtherCAT Box, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 1,5 A, M12, mit Inkremental-Encoder


connection
2 | Rx+
3 | Rx-
4 | Tx-
2 | A2
3 | B1
4 | B2
5 | n.c.
3, 4 | GND Motor
5 | n. c.
2 | Input B
3 | GND
4 | Input A
5 | Output
2 | V Enc
3 | A Enc
4 | B Enc
5 | C Enc
2 | +24 V DC UP
3 | GND
4 | GND

EP7041-1002 | EtherCAT Box, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 1,5 A, M12, mit Inkremental-Encoder
Dezentrale, absolute Systemsynchronisation: Mit Distributed-Clocks und EtherCAT.
Kompakte Antriebstechnik

Die EtherCAT Box EP7041-1002 ist für den direkten Anschluss unterschiedlicher Schrittmotoren vorgesehen. Die PWM-Endstufen für zwei Motorspulen sind bei geringster Bauform, zusammen mit zwei Eingängen für Endlagenschalter, in der Baugruppe untergebracht und decken einen großen Spannungs- und Strombereich ab. Mit einigen Parametern kann die EP7041-1002 an den Motor und die Anwendung angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt. Durch den Anschluss eines Inkremental-Encoders ist die Realisierung einer einfachen Servoachse möglich. Zwei digitale Eingänge und ein digitaler 0,5-A-Ausgang erlauben die Verbindung von Endschaltern und Motorbremse.
Produktstatus:
Serienlieferung
Produktinformationen
| Technische Daten | EP7041-1002 |
|---|---|
| Protokoll | EtherCAT |
| Businterface | 2 x M8-Buchse, 4-polig, A-kodiert, geschirmt |
| Anzahl Ausgänge | 1 Schrittmotor, 1 digitaler 24-V-DC-Ausgang |
| Anzahl Eingänge | 2 digitale Eingänge, Gebersystem (24-V-DC-Encoder) |
| Anschlusstechnik | M12-Buchse, 5-polig, A-kodiert |
| Lastart | 2-Phasen-Schrittmotor (uni-/bipolar) |
| Nennspannung | 8…48 V DC |
| Ausgangsstrom | 2 x 1 A, 2 x 1,5-A-Spitzenstrom (überlast- und kurzschlussfest) |
| Distributed Clocks | ja |
| Schrittfrequenz | konfigurierbar bis zu 8000 Vollschritte/s |
| Schrittmuster | 64-fach-Microstepping |
| Stromreglerfrequenz | ca. 30 kHz |
| Diagnose-LED | Fehler Strang A und B, Schrittverlust/Stillstand, Power, Enable |
| Auflösung | ca. 5000 Positionen (pro Umdrehung) |
| Anschluss Spannungsversorg. | Einspeisung: 1 x M8-Stecker, 4-polig, A-kodiert; Weiterleitung: 1 x M8-Buchse, 4-polig, A-kodiert |
| Potenzialtrennung | Steuerspannung/Feldbus: ja |
| Stromaufnahme aus US | 120 mA |
| Besondere Eigenschaften | Fahrwegsteuerung, Encodereingang |
| Gewicht | ca. 165 g |
| Betriebstemperatur | -25…+60 °C |
| Lagertemperatur | -40…+85 °C |
| Schwingungs-/Schockfestigkeit | gemäß EN 60068-2-6/EN 60068-2-27 |
| EMV-Festigkeit/-Aussendung | gemäß EN 61000-6-2/EN 61000-6-4 |
| Schutzart/Einbaulage | IP65/66/67 (gemäß EN 60529)/beliebig |
| Zulassungen/Kennzeichnungen | CE, ATEX, IECEx |
| Ex-Kennzeichnung | ATEX: II 3 G Ex ec IIC T4 Gc II 3 D Ex tc IIIC T135 °C Dc IECEx: Ex ec IIC T4 Gc Ex tc IIIC T135 °C Dc |
| Gehäusedaten | 8 x M8, 4 x M12 |
|---|---|
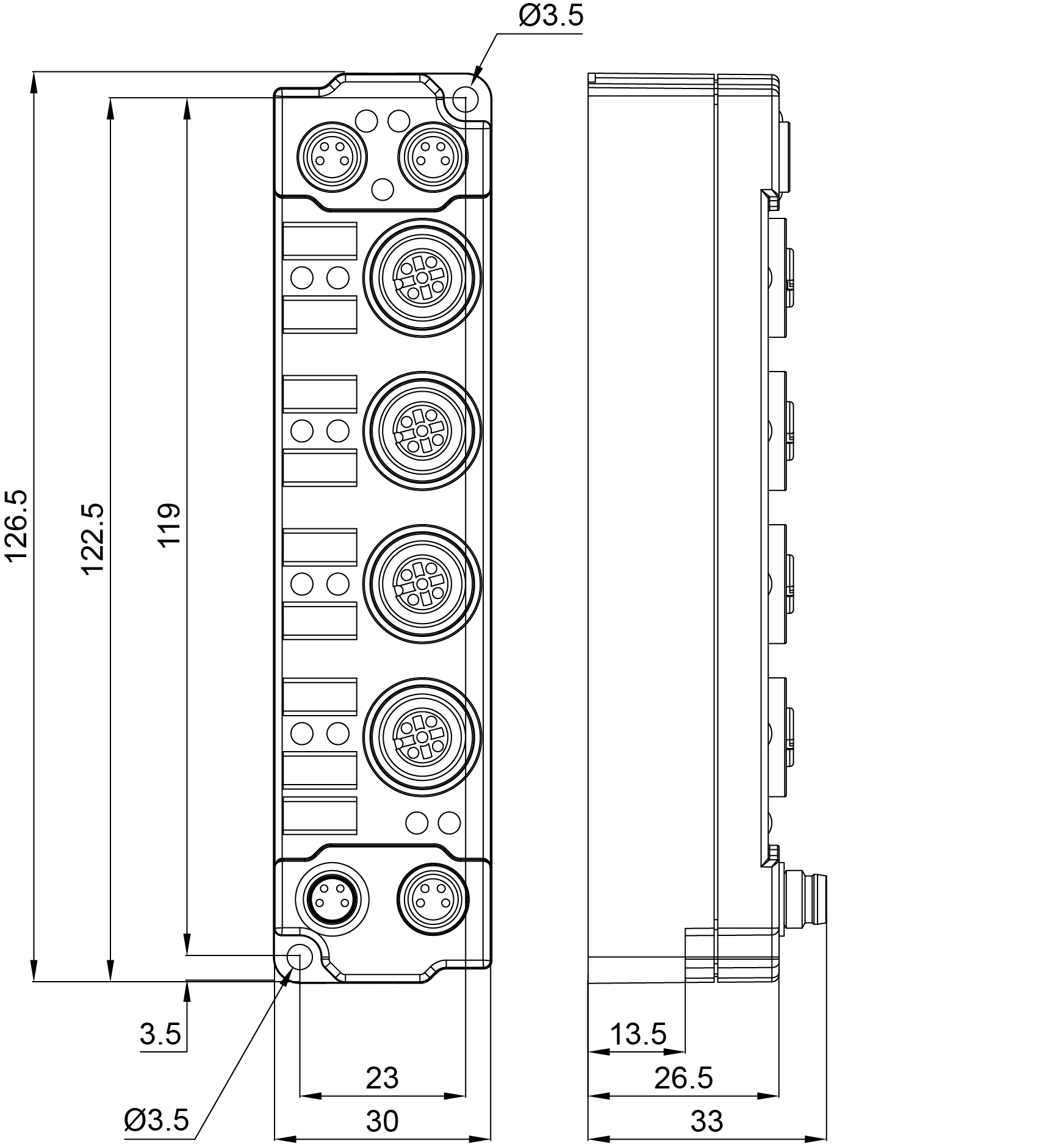
| Abmessungen (B x H x T) | 30 mm x 126 mm x 26,5 mm |
| Material | PA6 (Polyamid) |
| Montage | 2 x Befestigungslöcher Ø3,5 mm für M3 |
Inhalte werden geladen ...
| Material Compliance | EP7041-1002 |
|---|---|
| CAS-Nr. | 7439-92-1, 115-86-6 |
| REACH SVHC | Blei, Triphenylphosphat |
| REACH Annex XVII | konform |
| REACH Annex XIV | konform |
| SCIP-Nr. | SCIP submission in progress |
| POP | konform |
| RoHS | konform mit Ausnahme |
| RoHS-Ausnahme | 6c: Kupferlegierung mit einem Massenanteil von bis zu 4 % Blei, 7c-I: Blei enthaltende elektrische und elektronische Bauteile in Glas und Keramikwerkstoffen außer dielektrischer Keramik in Kondensatoren |
| China-RoHS | www.beckhoff.com/china-rohs-io |
| CA Prop65 | www.beckhoff.com/prop65 |
| Disclaimer | Diese Erklärung und die oben genannten Informationen sind nach unserem besten Wissen und Gewissen korrekt und basieren auf den Informationen, die wir von unseren Lieferanten erhalten haben. Diese Angaben entsprechen dem aktuellen Stand der Technik und den technischen Unterlagen unserer Lieferanten. Die Abwesenheit der Stoffe wird von Beckhoff Automation nicht durch analytische Untersuchungen überprüft. Alle in diesem Dokument enthaltenen Informationen unterliegen, soweit sie sich an unsere Kunden richten, den Bedingungen des jeweiligen Kundenvertrages. Es gelten unsere allgemeinen Geschäftsbedingungen. |
Inhalte werden geladen ...
Inhalte werden geladen ...
Inhalte werden geladen ...
Inhalte werden geladen ...
© Beckhoff Automation 2026 - Nutzungsbedingungen