
EL5101-0011 | EtherCAT Terminal, 1-channel encoder interface, incremental, 5 V DC (DIFF RS422), 5 MHz, oversampling



+24 V DC
0 V
supply UE, U0

EL5101-0011 | EtherCAT Terminal, 1-channel encoder interface, incremental, 5 V DC (DIFF RS422), 5 MHz, oversampling
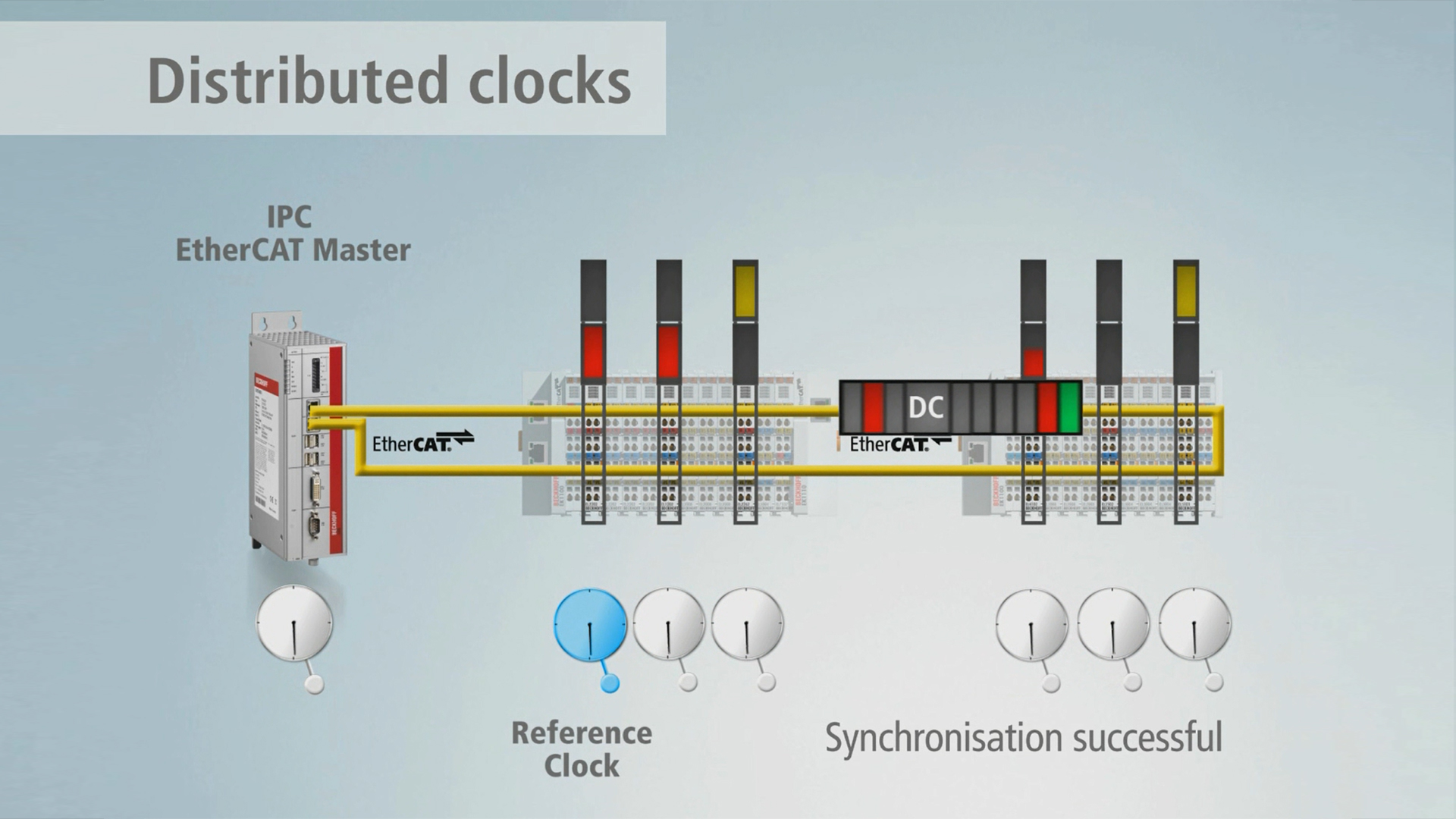
Distributed Clocks: the integrated time management system in EtherCAT

The EL5101-0011 EtherCAT Terminal is an interface for the direct connection of incremental encoders with differential signals (RS422). It processes the signals for a finer resolution of position values according to the oversampling principle. The 5 V and 24 V supply of the encoder can be provided directly via the terminal connection points.
Special features:
- high-resolution position detection through oversampling principle
- up to 100 measured values per PLC cycle with 10 µs sampling time
- maximum input frequency of 5 MHz
A conventional incremental encoder reads a counter value with each bus cycle and passes it on to the higher-level controller in the next fieldbus cycle. The EL5101-0011 reads the current counter value at several configurable and equidistant times between two fieldbus communication cycles with an adjustable whole number multiple (oversampling factor: n) of the bus cycle time. A packet of n position values of 32 bits each is then transmitted to the higher-level controller in the next fieldbus communication cycle. The minimum sampling time is 10 µs (100 ksps). The EL5101-0011 terminal is especially suitable for applications where high-resolution position detection is required.
Product status:
regular delivery
Product information
| Technical data | EL5101-0011 |
|---|---|
| Technology | incremental encoder interface, differential (RS422) |
| Number of channels | 1 |
| Encoder connection | 1 x A, B, C: differential inputs (RS422): A, A̅ (inv), B, B̅ (inv), C,C̅ (inv) |
| Encoder operating voltage | 5 V DC/max. 0.5 A (generated from the 24 V DC power contacts) |
| Counter | 1 x 32 bit |
| Limit frequency | 20 million increments/s (with 4-fold evaluation), corresponding to 5 MHz |
| Quadrature decoder | 4-fold evaluation |
| Distributed clocks | yes |
| Oversampling factor | n = 1…100 selectable |
| Cycle time | min. 500 µs |
| Conversion time | 10 µs/100 ksps |
| Current consumption power contacts | typ. 100 mA + load |
| Current consumption E-bus | typ. 130 mA |
| Electrical isolation | 500 V (E-bus/field potential) |
| Special features | oversampling, wire breakage detection, set counter |
| Weight | approx. 100 g |
| Operating temperature | -25…+60°C |
| Storage temperature | -40…+85°C |
| Relative humidity | 95%, no condensation |
| Vibration/shock resistance | conforms to EN 60068-2-6/EN 60068-2-27 |
| EMC immunity/emission | conforms to EN 61000-6-2/EN 61000-6-4 |
| Protect. rating/installation pos. | IP20/variable |
| Approvals/markings | CE, CCC, UL, ATEX, IECEx |
| Ex marking | ATEX: II 3 G Ex ec IIC T4 Gc IECEx: Ex ec IIC T4 Gc |
| Housing data | EL-24-2x8pin |
|---|---|
| Design form | compact terminal housing with signal LEDs |
| Material | polycarbonate |
| Installation | on 35 mm DIN rail, conforming to EN 60715 with lock |
| Side by side mounting by means of | double slot and key connection |
| Marking | labeling of the BZxxxx series |
| Wiring | solid conductor (s), flexible conductor (st) and ferrule (f): spring actuation by screwdriver |
| Connection cross-section | s*: 0.08…2.5 mm², st*: 0.08…2.5 mm², f*: 0.14…1.5 mm² |
| Connection cross-section AWG | s*: AWG28…14, st*: AWG28…14, f*: AWG26…16 |
| Stripping length | 8…9 mm |
| Current load power contacts | Imax: 10 A |
| Dimensions (W x H x D) | 24 mm x 100 mm x 68 mm |
*s: solid wire; st: stranded wire; f: with ferrule
Loading content ...
Loading content ...
Loading content ...
Loading content ...
© Beckhoff Automation 2026 - Terms of Use