
EKM1101 | EtherCAT Coupler with ID switch and diagnostics

EKM1101 | EtherCAT Coupler with ID switch and diagnostics
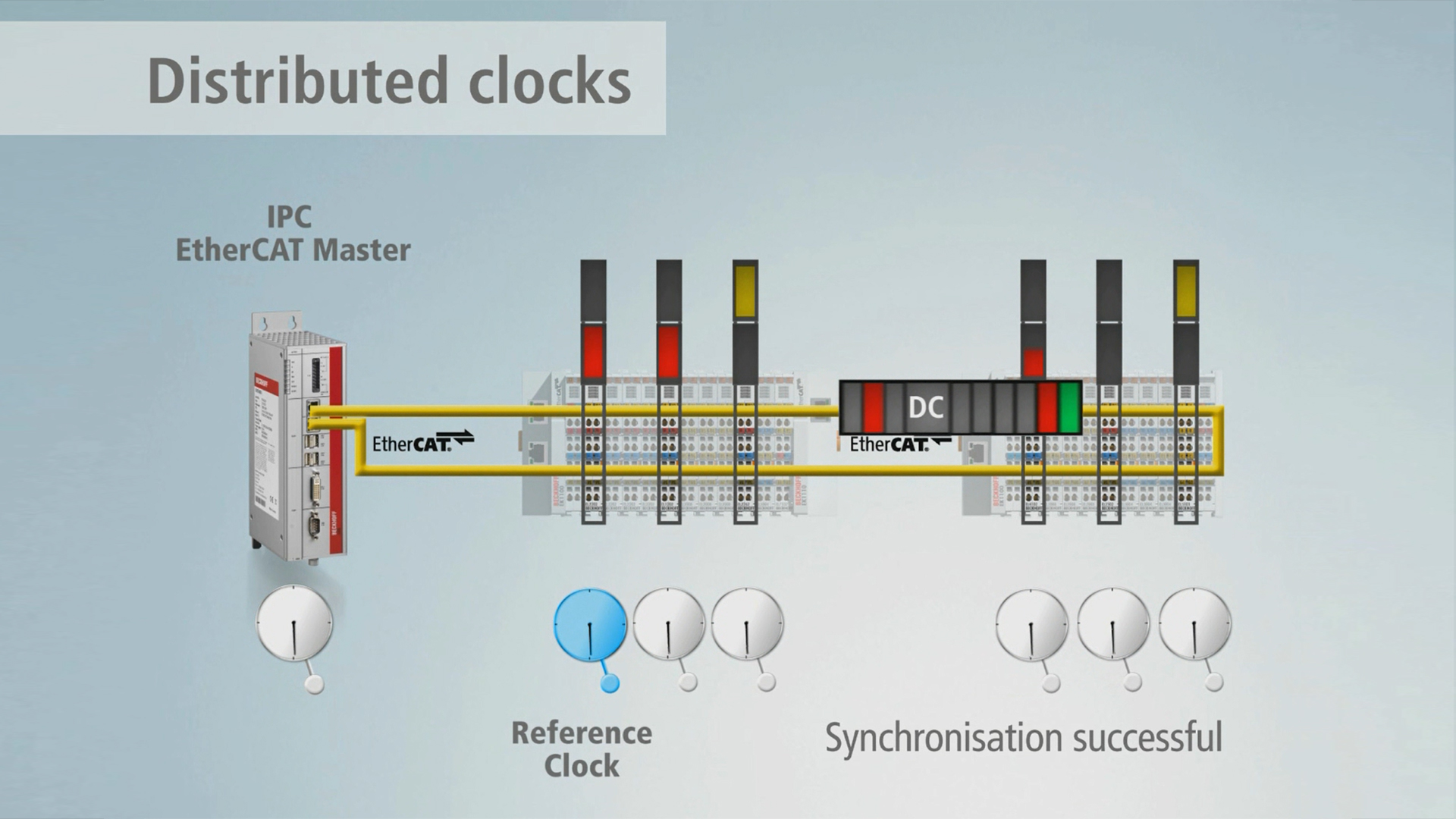
Distributed Clocks: the integrated time management system in EtherCAT

SPS 2019: Beckhoff Measurement Modules

The EKM1101 EtherCAT Coupler connects the ELMxxxx EtherCAT measurement modules with EtherCAT. Such a station consists of an EKM1101 coupler, any number of EtherCAT Terminals and a bus end cap or an EtherCAT extension such as EK1110 or EK1122. The coupler converts the passing telegrams from Ethernet 100BASE-TX to E-bus signal representation.
On account of three significant properties, the EKM1101 and the functionally identical ELM9410 power supply terminal are designed to meet the needs of high-precision analog measurement technology, e.g. with ELM3xxx terminals:
- To reduce interference in the connected terminal, both the E-bus supply US and the 24 V power contact supply UP are electrically isolated and filtered in the coupler. The power contact supply can carry a maximum load of 2 A.
- The extensive voltage and temperature monitoring provides assistance with commissioning and operation. Results are displayed by LED and in the process image.
- The built-in three-axis position and vibration sensor allows a constant view of the mechanical situation in the control cabinet.
As a result, the EKM1101 can be used in special measuring situations instead of the conventional EK1100 EtherCAT Coupler. Mixed operation with EL9410 is possible, but this negates the concept of electrical isolation. The EKM1101 has two hexadecimal ID switches for assigning an ID to a group of EtherCAT components. This group can then be located at any position within the EtherCAT network. Variable topologies are therefore easily implementable.
Product status:
regular delivery
Product information
| Technical data | EKM1101 |
|---|---|
| Task within EtherCAT system | coupling of EtherCAT Terminals (ELxxxx) to 100BASE-TX EtherCAT networks, with identity verification |
| Data transfer medium | Ethernet/EtherCAT cable (min. Cat.5), shielded |
| Distance between stations | max. 100 m (100BASE-TX) |
| Number of EtherCAT Terminals | up to 65,534 |
| Type/number of peripheral signals | max. 4.2 GB addressable I/O points |
| Number of configurable IDs | 256 |
| Protocol | EtherCAT |
| Delay | approx. 1 µs |
| Data transfer rates | 100 Mbit/s |
| Bus interface | 2 x RJ45 |
| Power supply | 24 V DC (-15 %/+20 %) |
| Current consumption E-bus | – |
| Current consumption from US | 50 mA + (∑ E-bus current/4) |
| Current consumption from UP | 50 mA + load |
| Current supply E-bus | 2000 mA |
| Power contacts | max. 24 V DC/max. 2 A |
| Special features | electrically isolated output voltages, reverse polarity protection, diagnostics of supply and output voltages |
| Electrical isolation | 500 V (power contact/supply voltage/EtherCAT) |
| Weight | approx. 450 g |
| Operating/storage temperature | 0…+55 °C/-25…+85 °C |
| Relative humidity | 95 %, no condensation |
| Vibration/shock resistance | conforms to EN 60068-2-6/EN 60068-2-27 |
| EMC immunity/emission | conforms to EN 61000-6-2/EN 61000-6-4 |
| Protect. rating/installation pos. | IP20/variable |
| Approvals/markings | CE, UL, ATEX, IECEx, cFMus |
| Ex marking | ATEX: II 3G Ex ec IIC T4 Gc IECEx: Ex ec IIC T4 Gc cFMus: Class I, Division 2, Groups A, B, C, D Class I, Zone 2, AEx ec IIC T4 Gc |
| Housing data | EKM-30-10pin |
|---|---|
| Design form | metal housing with signal LEDs |
| Material | zinc die-cast |
| Dimensions (W x H x D) | 30 mm x 100 mm x 95 mm |
| Installation | on 35 mm DIN rail, conforming to EN 60715 with lock |
| Side by side mounting by means of | double slot and key connection |
| Marking | – |
| Wiring | solid conductor (s), flexible conductor (st) and ferrule (f): spring actuation by screwdriver |
| Connection cross-section | s*: 0.2…1.5 mm², st*: 0.2…1.5 mm², f*: 0.25…0.75 mm² |
| Connection cross-section AWG | s*: AWG 24…14, st*: AWG 24…14, f*: AWG 24…14 |
| Stripping length | 8…9 mm |
*s: solid wire; st: stranded wire; f: with ferrule
Loading content ...
Loading content ...
Loading content ...
Loading content ...
© Beckhoff Automation 2024 - Terms of Use