
TF5410 | TwinCAT 3 Motion Collision Avoidance

TF5410 | TwinCAT 3 Motion Collision Avoidance

TwinCAT 3 Motion Collision Avoidance ist ein optionales Paket zur Kollisionsvermeidung beim Betrieb mehrerer Achsen mit TwinCAT 3 NC PTP in linearer und/oder translatorischer Abhängigkeit. Der zugrunde liegende Algorithmus sorgt für einen Mindestabstand zur Vorgängerachse. Dadurch ist mit TwinCAT 3 Motion Collision Avoidance eine aktive Kollisionsvermeidung realisierbar, wenn mehrere Motoren sich z. B. eine Schiene teilen. Neben der aktiven Kollisionsvermeidung kann das TF5410 auch genutzt werden, um Achsen kontrolliert aufzustauen, bspw. bei linearen Bewegungen wie dem XTS (eXtended Transport System).
Die Programmierung der Verfahrbefehle aus der SPS ist an die Standard-PTP-Motion-Bibliothek angelehnt und um den Eingang „Gap“ erweitert. Mit TwinCAT 3 Motion Collision Avoidance können so z. B. alle Achsen auf die gleiche Zielposition gestartet werden. Der Algorithmus sorgt dann dafür, dass nur die erste Achse die Zielposition anfährt. Die verbleibenden Achsen halten automatisch ihren Mindestabstand ein und reihen sich auf. So lassen sich ohne weitere Programmierung dynamische Puffer zum Aufstauen von Produkten bilden.
Produktstatus:
Serienlieferung
Produktinformationen
| Technische Daten | TF5410 |
|---|---|
| Benötigte Lizenz | TC1250 |
| Betriebssystem | Windows 7, Windows 10, TwinCAT/BSD |
| CPU-Architektur | x64 |
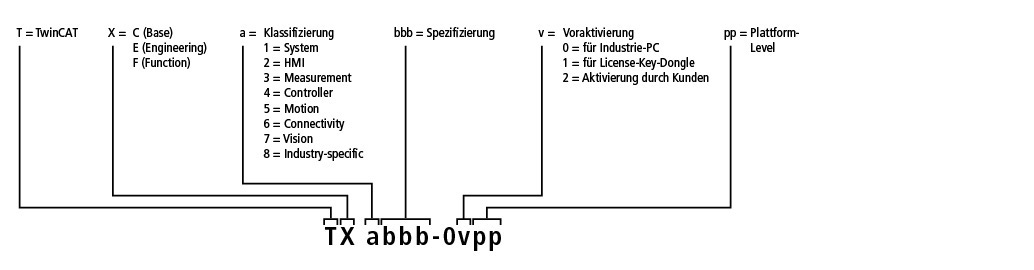
| Bestellangaben | |
|---|---|
| TF5410-0v40 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 40 (Performance) |
| TF5410-0v50 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 50 (Performance Plus) |
| TF5410-0v60 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 60 (Mid Performance) |
| TF5410-0v70 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 70 (High Performance) |
| TF5410-0v80 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 80 (Very High Performance) |
| TF5410-0v81 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 81 (Very High Performance) |
| TF5410-0v82 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 82 (Very High Performance) |
| TF5410-0v83 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 83 (Very High Performance) |
| TF5410-0v84 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 84 (Very High Performance) |
| TF5410-0v90 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 90 (Other) |
| TF5410-0v91 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 91 (Other 5…8 Cores) |
| TF5410-0v92 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 92 (Other 9…16 Cores) |
| TF5410-0v93 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 93 (Other 17…32 Cores) |
| TF5410-0v94 | TwinCAT 3 Motion Collision Avoidance, Plattform-Level 94 (Other 33…64 Cores) |
Für Plattform-Level 90-94 empfehlen wir den Einsatz eines TwinCAT-3-Lizenzdongles.
Inhalte werden geladen ...
Inhalte werden geladen ...
Inhalte werden geladen ...
© Beckhoff Automation 2024 - Nutzungsbedingungen