
TF5410 | TwinCAT 3 Motion Collision Avoidance

TF5410 | TwinCAT 3 Motion Collision Avoidance

TwinCAT 3 Motion Collision Avoidance is an optional package that prevents collisions when operating a number of linearly and/or translationally dependent axes with TwinCAT 3 NC PTP. The underlying algorithm ensures the maintenance of a minimum distance from the previous axis. In this way, TwinCAT 3 Motion Collision Avoidance actively prevents collisions when a number of motors are using e.g. the same rail. As well as active collision avoidance, TF5410 can also be used to allow axes to accumulate in a controlled way, for example when carrying out linear movements such as with XTS (eXtended Transport System).
Programming of the PLC’s movement commands is based on the standard PTP motion library with an additional input “gap”. For example, when using TwinCAT 3 Motion Collision Avoidance, all the axes can be given the same target position. The algorithm then ensures that only the first axis actually moves to that position. The remaining axes automatically line up while maintaining their minimum distance. This means that no further programming effort is needed in order to implement a dynamic buffer in which products can accumulate.
Product status:
regular delivery
Product information
| Technical data | TF5410 |
|---|---|
| Required license | TC1250 |
| Included in | TF5850, TF5890 |
| Operating system | Windows 10, Windows 11, TwinCAT/BSD |
| CPU architecture | x64 |
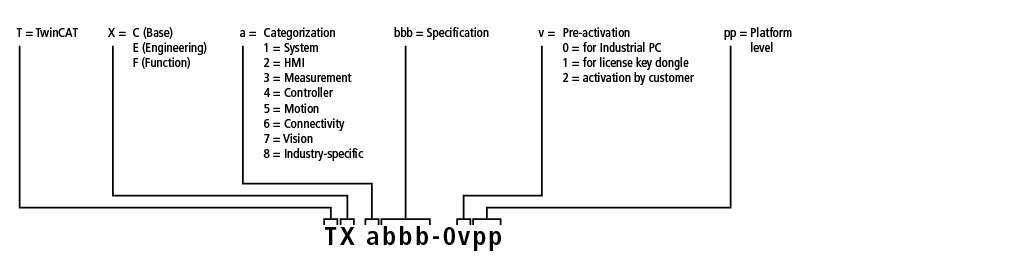
| Ordering information | |
|---|---|
| TF5410-0v40 | TwinCAT 3 Motion Collision Avoidance, platform level 40 (Performance) |
| TF5410-0v50 | TwinCAT 3 Motion Collision Avoidance, platform level 50 (Performance Plus) |
| TF5410-0v60 | TwinCAT 3 Motion Collision Avoidance, platform level 60 (Mid Performance) |
| TF5410-0v70 | TwinCAT 3 Motion Collision Avoidance, platform level 70 (High Performance) |
| TF5410-0v80 | TwinCAT 3 Motion Collision Avoidance, platform level 80 (Very High Performance) |
| TF5410-0v81 | TwinCAT 3 Motion Collision Avoidance, platform level 81 (Very High Performance) |
| TF5410-0v82 | TwinCAT 3 Motion Collision Avoidance, platform level 82 (Very High Performance) |
| TF5410-0v83 | TwinCAT 3 Motion Collision Avoidance, platform level 83 (Very High Performance) |
| TF5410-0v84 | TwinCAT 3 Motion Collision Avoidance, platform level 84 (Very High Performance) |
| TF5410-0v90 | TwinCAT 3 Motion Collision Avoidance, platform level 90 (Other 1…4 Cores) |
| TF5410-0v91 | TwinCAT 3 Motion Collision Avoidance, platform level 91 (Other 5…8 Cores) |
| TF5410-0v92 | TwinCAT 3 Motion Collision Avoidance, platform level 92 (Other 9…16 Cores) |
| TF5410-0v93 | TwinCAT 3 Motion Collision Avoidance, platform level 93 (Other 17…32 Cores) |
| TF5410-0v94 | TwinCAT 3 Motion Collision Avoidance, platform level 94 (Other 33…64 Cores) |
We recommend using a TwinCAT 3 license dongle for platform levels 90-94.
Loading content ...
Loading content ...
© Beckhoff Automation 2026 - Terms of Use