海洋與環境領域的PC-based控制
水中的廢棄物約有70%會沉到大海底下或分解成總數達數千萬噸的微米與奈米塑膠。MAELSTROM研究計畫以AI系統為基礎,為深達20公尺的水域開發了一個能辨識與收集物品的自主機器人。以PC-based控制裝置達到自動化的機器人系統,於2022年9月在威尼斯運河中通過測試。
若您希望防止垃圾污染脆弱的水下生態系統,或防止微米與奈米塑膠透過食物鏈進入我們的體內,便需要防止水體受到進一步污染並清除水底的廢棄物。這正是歐盟「展望2020 – MAELSTROM計畫」的目標:開發並整合技術以便將所有類型的海洋垃圾加以辨識、移除、分類並轉換成原材料。目前為止,一支由來自TECNALIA(西班牙)、CNRS-LIRMM(法國)與Servizi Tecnici(義大利)等組織代表組成的研究團隊已開發出「海床清理機器人平台」。其核心是一個配備有能在絞車協助下於六度範圍內自由移動的夾子與吸取裝置之機器人。
該機器人會利用感測器與攝影機偵測海床上的垃圾、自動移到其上方再撿起重達130公斤的物體,包括自行車、輪胎、箱子與網子等。浮在水中的較小零件或塑膠片則會以吸收裝置回收。「因為我們會從水面上操作並僅在必要時啟動夾子或吸盤,所以能做到高度篩選,將對海床生態系統的影響降到最低,」來自TECNALIA的MAELSTROM專案經理Mariola Rodríguez解釋道。
絞車的位置透過Beckhoff的 AX5118伺服驅動器與AM8071伺服馬達同步控制。「為確保能紮實、準確與快速就定位,我們選用了無刷式同步伺服馬達,」TECNALIA的纜線機器人團隊電子工程師Jose Gorrotxategi提到。驅動器的單電纜技術(OCT)還有一個好處,就是能減少配線量及絞車的空間需求。絞車的鋼纜讓機器人架可以在水下精確定位,並以高度穩定性維持住位置,即使偶爾遇到強大水流也不受影響。馬達機軸上的編碼器會偵測纜線捲盤的角度與圈數,讓其間接得到捲起的纜線長度。
電磁制動以及透過力道感測器進行的纜線張力監測能確保必要的安全性。若測量到的值超出容許範圍,纜線機器人便會立即停止,並顯示一則錯誤訊息。
水上與水下的感測器組
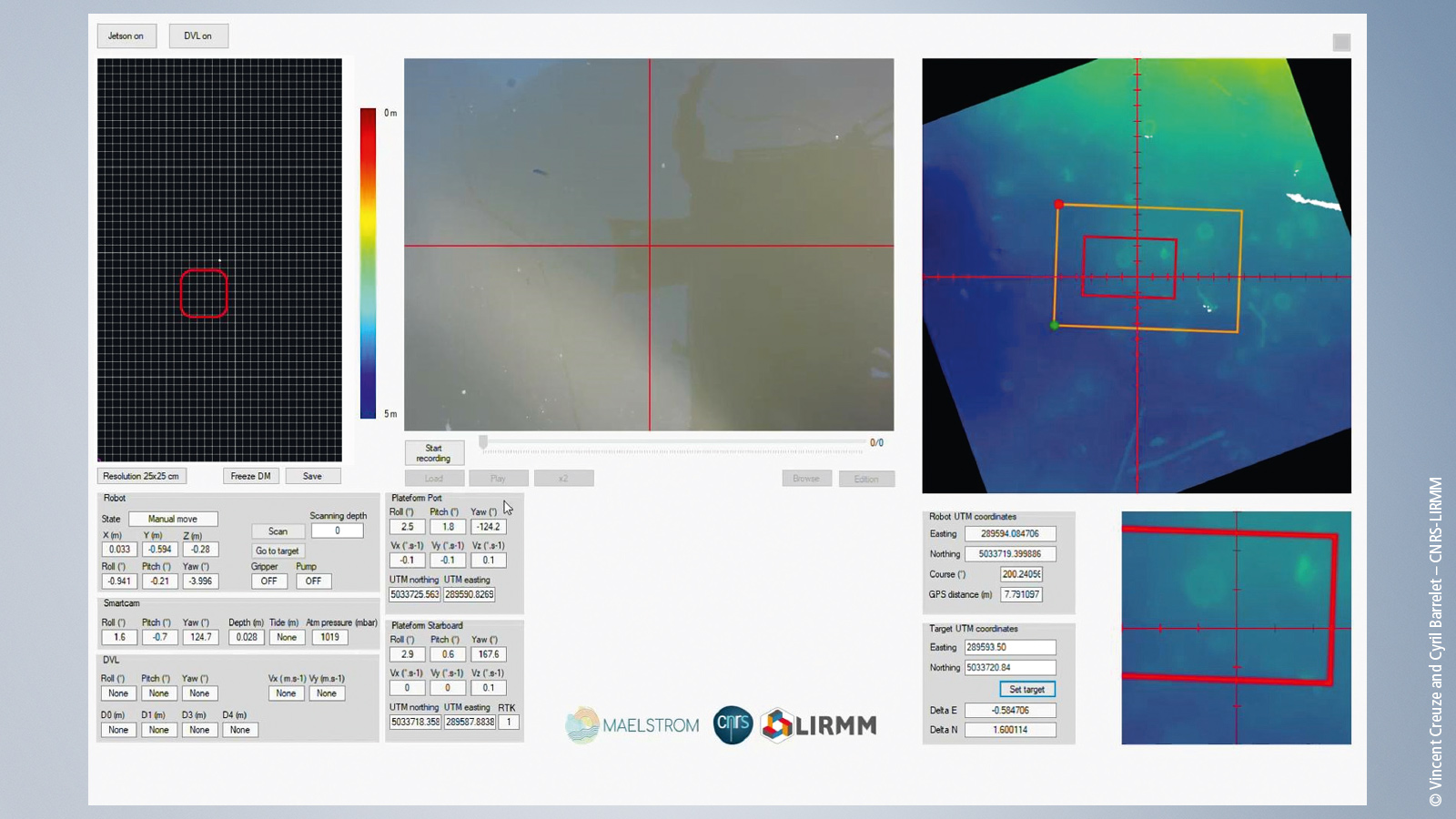
基於控制與監測的目的,水下纜線機器人的機架有數個能手動、自動與遠端操作的感測器與攝影機。「這些攝影機與照明能在水下能見度不會太差的情況下手動控制,」TECNALIA之纜線機器人團隊的機械與控制工程師Pierre-Elie Herve補充道。操作人員能點一下攝影機畫面中水床上的交錯點,接著機器人便會自動朝那邊移動。機器人架上的壓力感測器會偵測潛水深度,並有一個慣性測量單元(IMU)會調整其在水中的位置。移動平臺至海床的距離及其與海床的相對速度會透過四具聲納感測器以都卜勒速度紀錄儀(DVL)記錄下來。
其他感測器則位於水面的浮筒上,包含一個用於在深度控制過程中彌補大氣壓力變化的壓力感測器。兩個即時動態GPS單元會即時判斷駁船的位置與垂直方向。來自這些不同系統的所有資料均會整合到機器人的控制與位置調整系統中。機器人平台會依據這些數值執行如精確接近與將位置精準維持在於深度圖(水深圖)上選擇的位置等工作,能加速機器人作業。「此功能已在威尼斯潟湖非常混濁的水中證實為一項重要功能,」Mariola Rodríguez指出。
纜線機器人的控制與通訊
憑藉著總數達十二個的機軸(八個絞盤與浮筒桅杆上的四個可垂直移動滑架),讓安裝於C6650工業PC上的TwinCAT 3能夠控制水下機器人。此裝置安裝於控制室中的主控制機箱內。除了纜線力道監測外,系統(控制室、無線控制與絞車)搭配的急停按鈕能確保運作安全。對應的安全邏輯由EL6910 EtherCAT終端機搭配TwinSAFE邏輯執行。內建制動裝置的伺服驅動器會透過AX5805 TwinSAFE驅動選項卡整合到安全應用中。
分散安裝在纜線絞車上的另外四個分配箱,含有I/O介面模組與用於測量纜線力道的電子系統。透過Ethercat P建立控制機箱與分配箱間的連線。Jose Gorrotxategi表示「這個EtherCAT技術的延伸能在單一纜線上同時傳輸DC電源與EtherCAT即時通訊。」
機器人平台控制
以搖桿控制纜線機器人時,操作員會用到移動式水下平台的預估位置及移動平台上的攝影機。除透過水下攝影機目視控制外,操作員可利用人機介面選擇各種控制模式並依感測器值監測所有功能。
水下觀察用攝影機系統主要用於目視伺服控制:只要操作員看見海洋廢棄物(由於水濁度讓攝影機視距相對較短)時,便可以按一下攝影機畫面上的廢棄物,纜線機器人的移動平台便會自動朝廢棄物前進。
人機介面中還內建了以DVL系統與攝影機建立的深度圖。操作員可在此畫面中選擇任一點,移動平台便會朝那邊移動。除了手動操作外,機架也能自主辨識、標記與收集垃圾。「這是以人工智慧為基礎運作的,能夠辨識海洋廢棄物並選擇最適合的清除裝置,」Pierre-Elie Herve指出。
為清理海床之機器人平台所開發的軟體,能靠即時GPS(即時動態或RTK)以及會測量與通報位置或方向的慣性測量單元,即時運算機器人的地理位置,並同時監測與控制絞車。此外,機器人的位置會顯示在海床圖上,其還會顯示廢棄物的位置。機器人可用軟體以自動模式移動再判斷「水中的軌跡」,或透過搖桿手動控制。機器人移動時,攝影機結合聲音感測器會掃描海床以測量深度(水深)並偵測垃圾。此資料會含地理資訊並即時重疊在地圖上。


