
ER7342-0002 | EtherCAT Box, 1-Kanal-Motion-Interface, DC-Motor, 48 V DC, 4,5 A, M12, mit Inkremental-Encoder, Zinkdruckguss


connection
2 | Rx+
3 | Rx-
4 | Tx-
2 | A2
3 | B1
4 | B2
5 | n.c.
3, 4 | GND Motor
5 | n. c.
2 | V Enc
3 | A Enc
4 | B Enc
5 | C Enc
2 | V Enc
3 | A Enc
4 | B Enc
5 | C Enc
2 | +24 V DC UP
3 | GND
4 | GND

ER7342-0002 | EtherCAT Box, 1-Kanal-Motion-Interface, DC-Motor, 48 V DC, 4,5 A, M12, mit Inkremental-Encoder, Zinkdruckguss
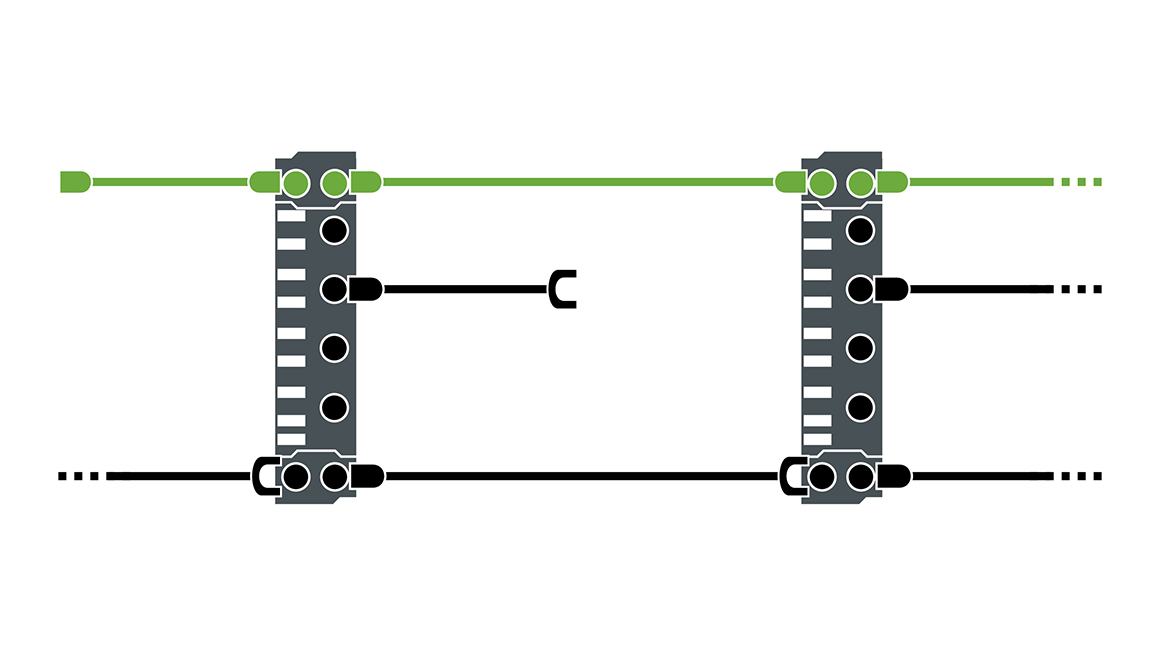
Verkabelungsübersicht

Die EtherCAT Box ER7342 ermöglicht den direkten Betrieb von zwei DC-Motoren. Drehzahl und Position werden durch einen 16-Bit-Wert vom Automatisierungsgerät vorgegeben. Durch den Anschluss eines Inkremental-Encoders (24 V DC, single-ended) ist die Realisierung einer einfachen Servoachse möglich. Die Ausgangsstufe ist überlast- und kurzschlusssicher. Die EtherCAT Box enthält zwei Kanäle, deren Signalzustand durch Leuchtdioden angezeigt wird. Die LEDs ermöglichen eine schnelle Vor-Ort-Diagnose.
Die EtherCAT-Box-Module im Zinkdruckguss-Gehäuse können in extrem schwieriger Industrie- und Prozessumgebung eingesetzt werden. Durch den Vollverguss und die Metalloberfläche ist die ER-Serie ideal bei erhöhten Erfordernissen an Belastbarkeit und Beständigkeit beispielsweise gegen Schweißspritzer.
Produktstatus:
Serienlieferung
Produktinformationen
| Technische Daten | ER7342-0002 |
|---|---|
| Protokoll | EtherCAT |
| Businterface | 2 x M8-Buchse, 4-polig, A-kodiert, geschirmt |
| Anzahl Ausgänge | 2 |
| Anschlusstechnik | M12-Buchse, 5-polig, A-kodiert |
| Nennlastspannung | 8…48 V DC |
| Lastart | Bürsten-DC-Motor, induktiv |
| Ausgangsstrom | max. 2 x 3,5 A (kurzschlussfest, thermische Überlastwarnung zusammen für beide Endstufen) je Kanal |
| Distributed Clocks | ja |
| PWM-Taktfrequenz | 32 kHz, je 180° phasenverschoben |
| Tastverhältnis | 0…100 % (spannungsgeregelt) |
| Auflösung | max. 10-Bit-Strom, 16-Bit-Geschwindigkeit |
| Anschluss Spannungsversorg. | Einspeisung: 1 x M8-Stecker, 4-polig, A-kodiert; Weiterleitung: 1 x M8-Buchse, 4-polig, A-kodiert |
| Potenzialtrennung | 500 V |
| Konfiguration | Anpassung und Optimierung des jeweiligen Motors durch die Steuerung |
| Stromaufnahme Sensorspannung | 20 mA (siehe Dokumentation) |
| Stromaufnahme aus US | 120 mA |
| Besondere Eigenschaften | Fahrwegsteuerung, Encodereingang |
| Gewicht | ca. 265 g |
| Betriebstemperatur | -25…+60 °C |
| Lagertemperatur | -40…+85 °C |
| Schwingungs-/Schockfestigkeit | gemäß EN 60068-2-6/EN 60068-2-27 |
| EMV-Festigkeit/-Aussendung | gemäß EN 61000-6-2/EN 61000-6-4 |
| Schutzart/Einbaulage | IP65/66/67 (gemäß EN 60529)/beliebig |
| Zulassungen/Kennzeichnungen | CE |
| Gehäusedaten | 8 x M8, 4 x M12 |
|---|---|
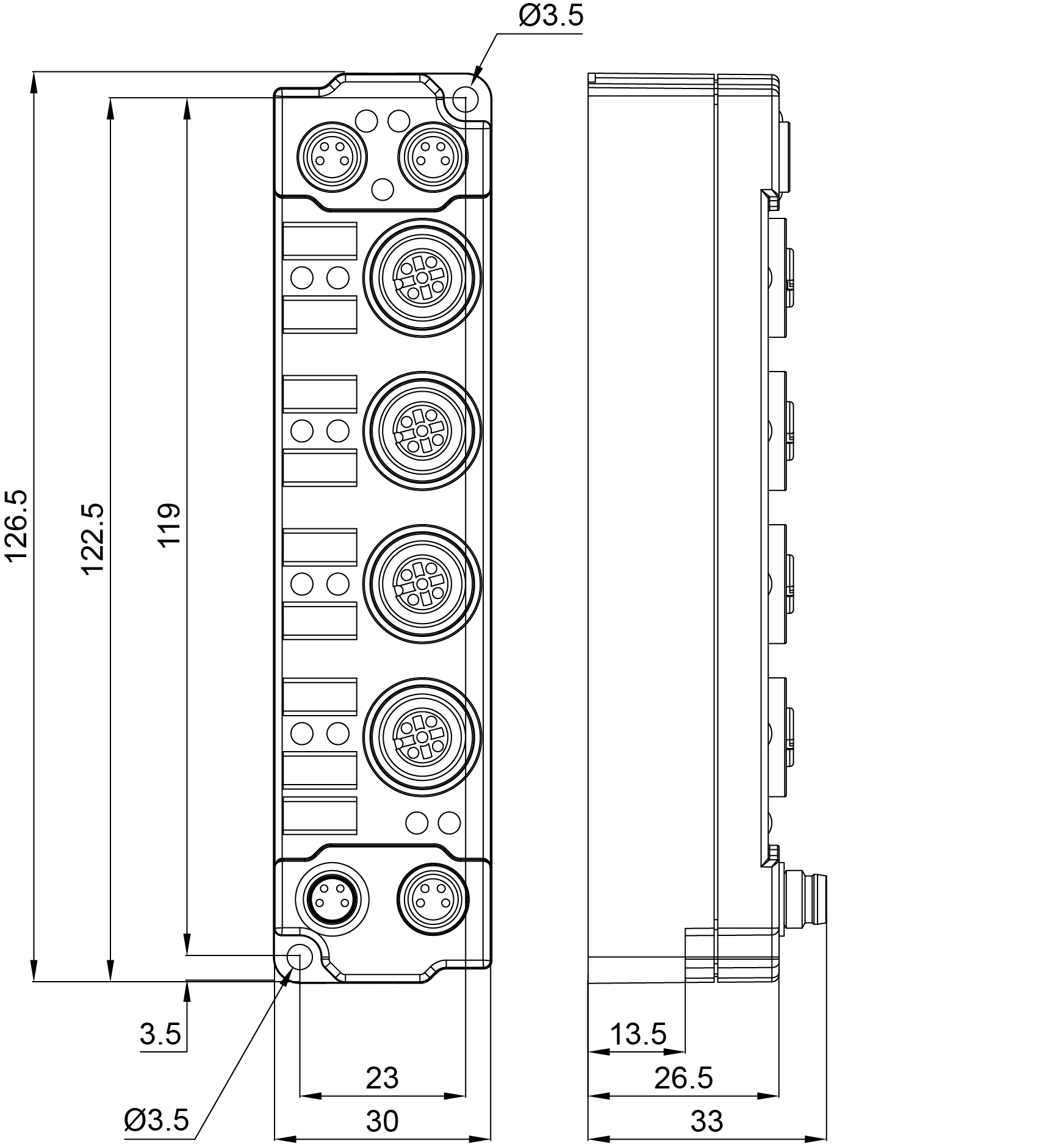
| Abmessungen (B x H x T) | 30 mm x 126 mm x 26,5 mm |
| Material | Zinkdruckguss |
| Montage | 2 x Befestigungslöcher Ø3,5 mm für M3 |
Inhalte werden geladen ...
Inhalte werden geladen ...
Inhalte werden geladen ...
© Beckhoff Automation 2026 - Nutzungsbedingungen