
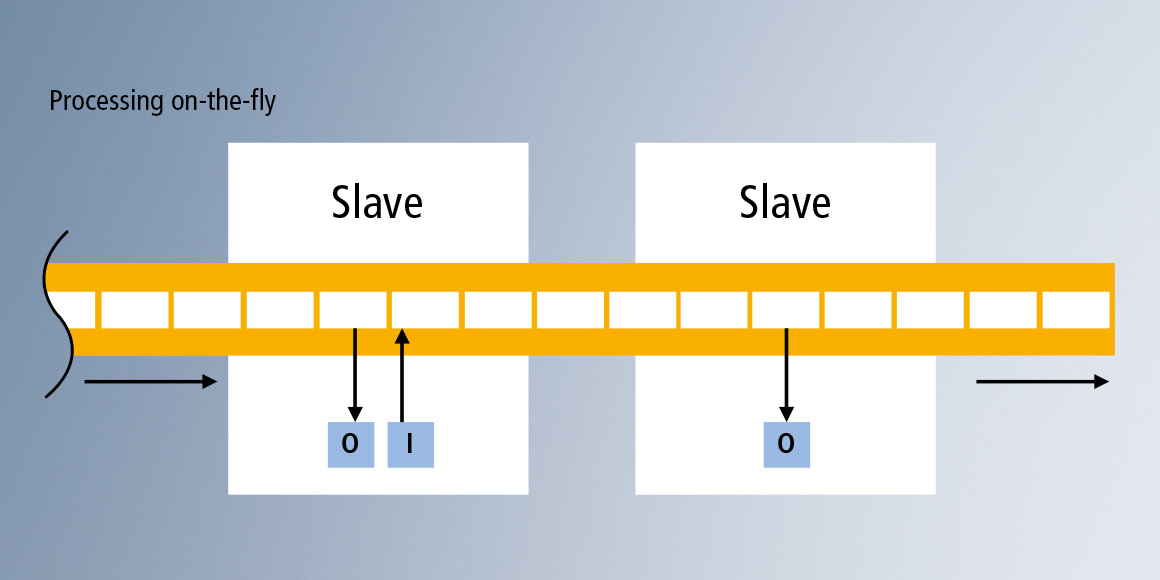
Telegrammverarbeitung im Durchlauf mit 100 MBit/s, 1 GBit/s und 10 GBit/s
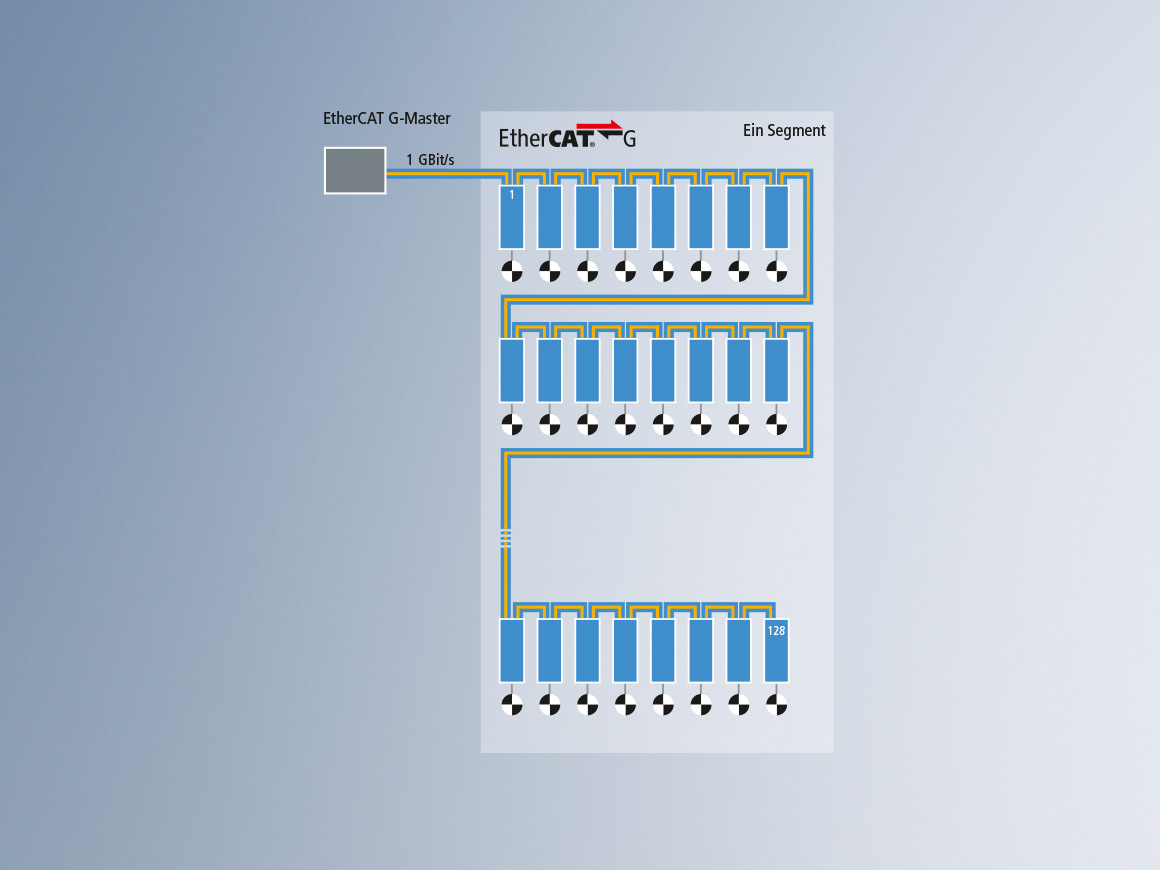
EtherCAT G ist die Fortführung des EtherCAT-Erfolgsprinzips in nun technologisch verfügbaren Geschwindigkeiten mit 1 GBit/s und 10 GBit/s. Das EtherCAT-Protokoll selbst bleibt dabei unverändert. Das vom EtherCAT-Master ausgesandte Telegramm durchläuft die Teilnehmer. Jeder EtherCAT-Slave liest die an ihn adressierten Ausgangsdaten „on the fly“ und legt seine Eingangsdaten in den weitergeleiteten Frame – jetzt mit 1 bzw. 10 GBit/s. Das Telegramm wird nur durch Hardware-Durchlaufzeiten verzögert. Der letzte Teilnehmer eines Segments (oder Abzweigs) erkennt einen unbenutzten Port und sendet das Telegramm zum Master zurück – hierbei wird die Vollduplex-Eigenschaft der Ethernet-Physik ausgenutzt.
Auch alle anderen Eigenschaften von EtherCAT bleiben bei EtherCAT G/G10 vollständig erhalten. Geräte mit drei oder vier Ports (Junctions) ermöglichen flexible Topologien, genau so, wie sie von der Maschinenarchitektur gefordert werden. Optionale Maschinenmodule können weiterhin per Hot Connect je nach Bedarf an oder abgesteckt werden. Eine netzwerkweite Diagnose hilft Stillstandszeiten der Maschine zu miniminieren und erhöht somit die Verfügbarkeit. Selbstverständlich sorgt das integrierte Konzept der verteilten Uhren (Distributed Clocks) auch weiterhin für Synchronisierungsgenauigkeiten besser 100 ns zwischen den Teilnehmern.
Echtzeit-Ethernet bis zur I/O-Ebene
- flexible Topologie
- hervorragende Diagnose
- Synchronisierungsgenauigkeit besser 100 ns
- einfachste Parametrierung/Konfiguration
- geringe Systemkosten
- maximale Performance
- Functional Safety integrierbar
- IEEE-802.3-konform
EtherCAT G: Erweiterung des Einsatzbereiches von EtherCAT
Hohe Leistung für anspruchsvolle Anwendungen: 100 Servoachsen alle 30 μs, 2.000 digitale Ein-/Ausgänge alle 15 μs
Die hervorragende Performance von EtherCAT erfüllt seit der Einführung im Jahr 2003 nahezu alle Anforderungen der Anwender in unzähligen Branchen und Applikationen – von hochdynamischen Werkzeugmaschinen über komplexe Verpackungsmaschinen bis hin zu Logistikzentren. Machine Vision, Condition Monitoring oder auch die innovativen Transportsysteme XTS und XPlanar benötigen für jeden Teilnehmer mehrere hundert Byte Prozessdaten je Zyklus.
In Verbindung mit kurzen Zykluszeiten von ≤ 1 Millisekunde sind dafür hohe Übertragungsbandbreiten gefordert. Mit EtherCAT G können diese Anwendungen nun mit einem EtherCAT G-Master bedient und gleichzeitig weitere Automatisierungsgeräte oder Antriebe eingebunden werden. Um die Nachfrage nach immer kürzeren Zykluszeiten in immer größer werdenden Anlagen mit vielen Teilnehmern zu erfüllen, wurde das Branch-Konzept entwickelt.
Auch große Anlagen können dadurch von einem zentralen Master synchronisiert betrieben werden. Mit EtherCAT G und EtherCAT G10 reicht dafür ein Port am Master für alle Anwendungen aus:


Messtechnik
- Oversampling ermöglicht die Erfassung eines Messsignals in erhöhter Auflösung, unabhängig vom Steuerungszyklus.
- Sampleraten 100…500 kSamples/s
Motion
- Viele (gekoppelte) Achsen müssen exakt synchronisiert und hochdynamisch verfahren werden.

XFC
- eXtreme Fast Control
- I/O-Response-Zeiten < 100 μs
- höhere Auflösung durch EtherCAT G/G10
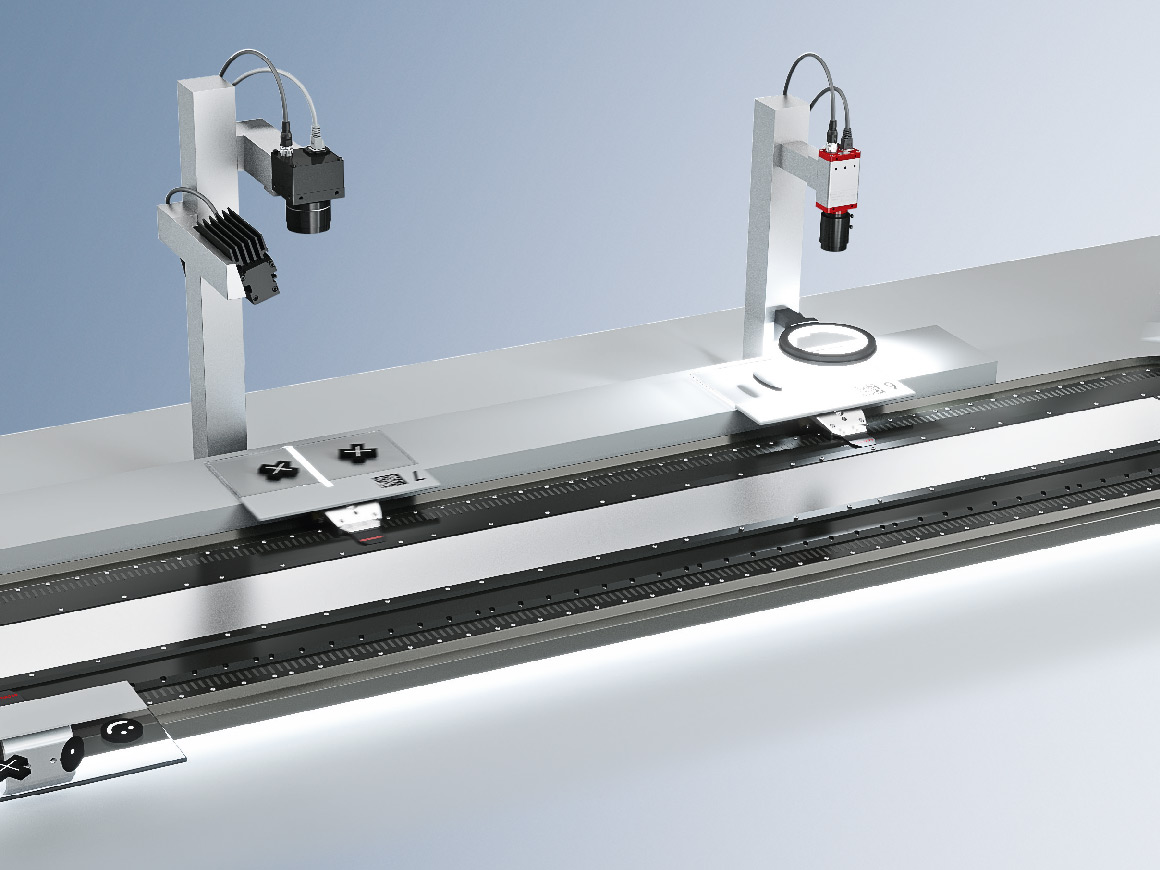
Vision
- Übertragung von Bildern mit hoher Auflösung und hohen Bildwiederholraten
- gleichzeitig synchronisiertes Auslösen der Bildaufnahme
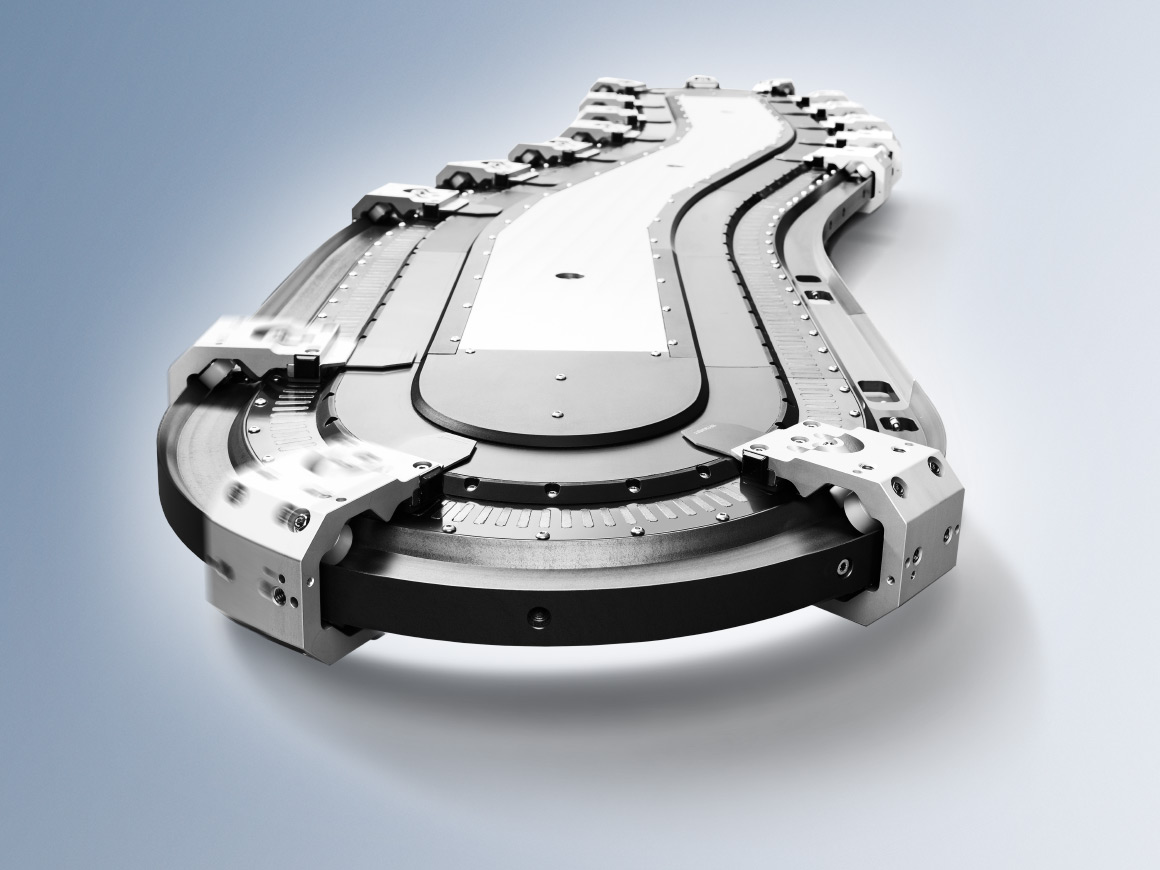
XTS
- sehr hohe Datenraten (25 MBit/s pro Meter XTS-Strecke) durch Übertragung der Moverpositionen und Sollwerte mit sehr kurzen Zykluszeiten
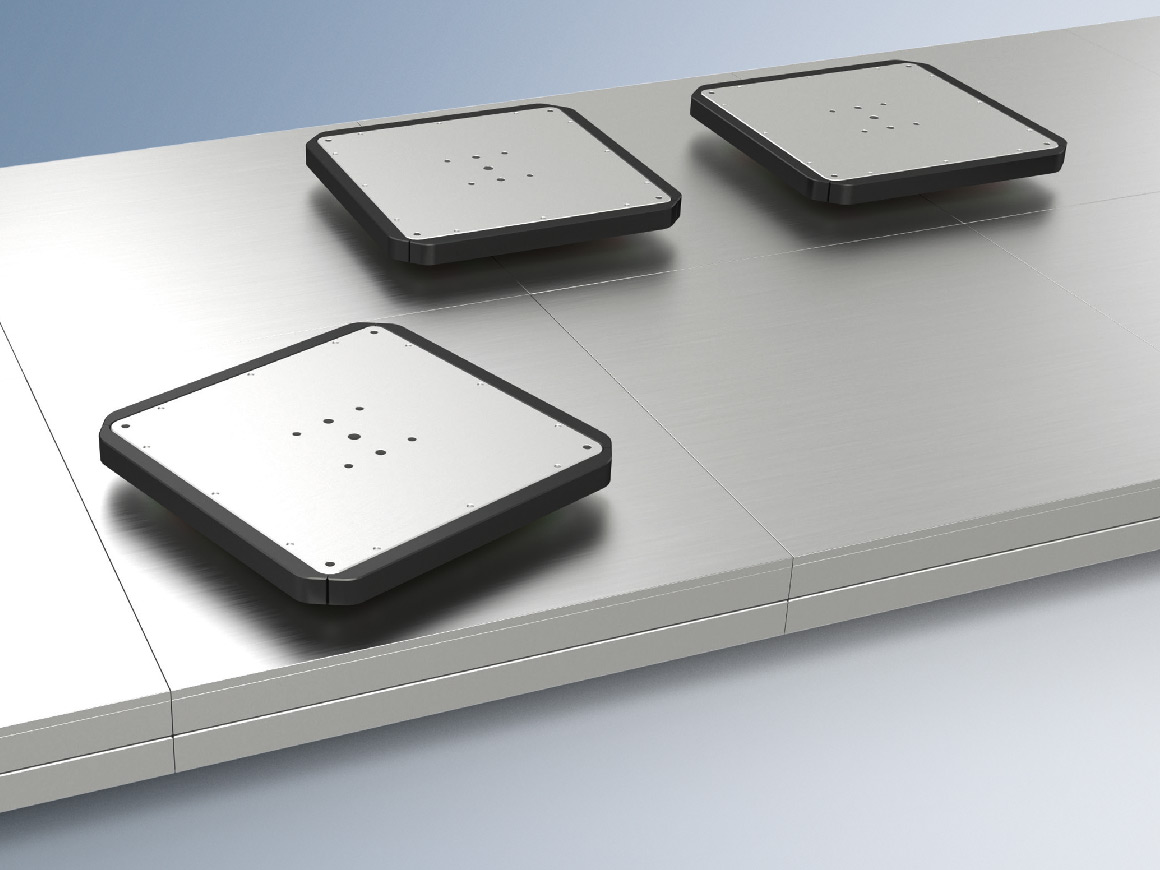
XPlanar
- Sechs Freiheitsgrade für eine beliebige Positionierung erfordern hohe Datenraten und kurze Reaktionszeiten.
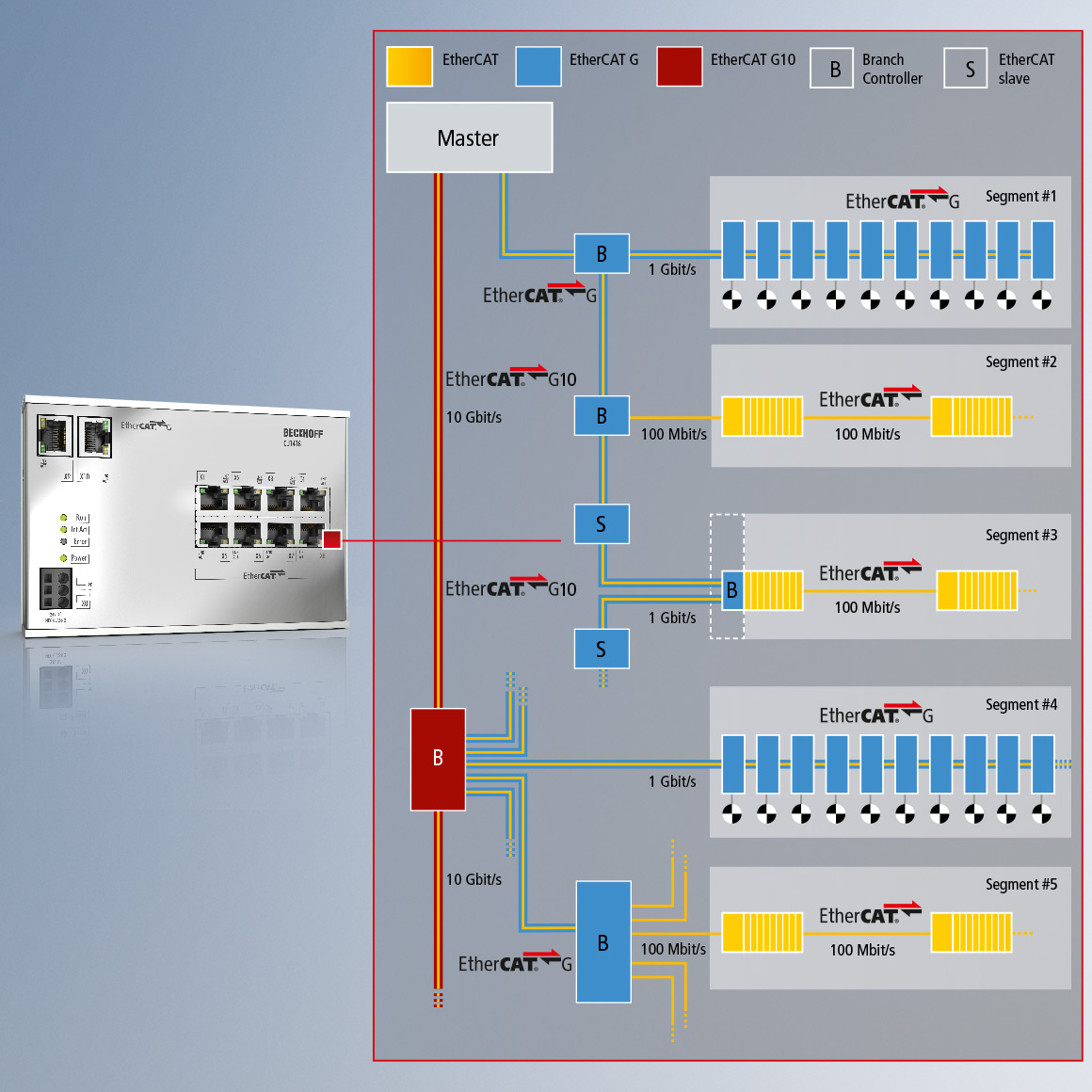
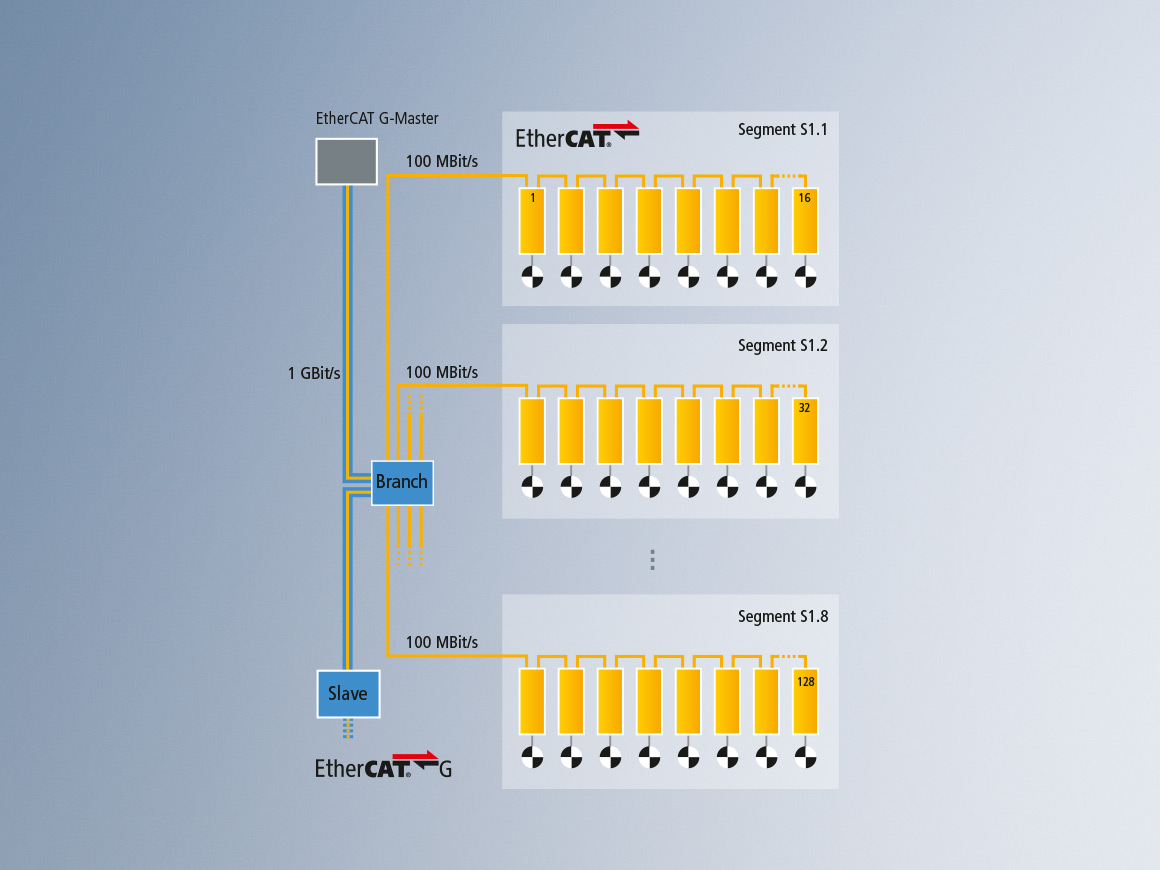
EtherCAT Branch Management
- Integration von 100-MBit/s-Geräten und -Segmenten in ein EtherCAT G-Netzwerk
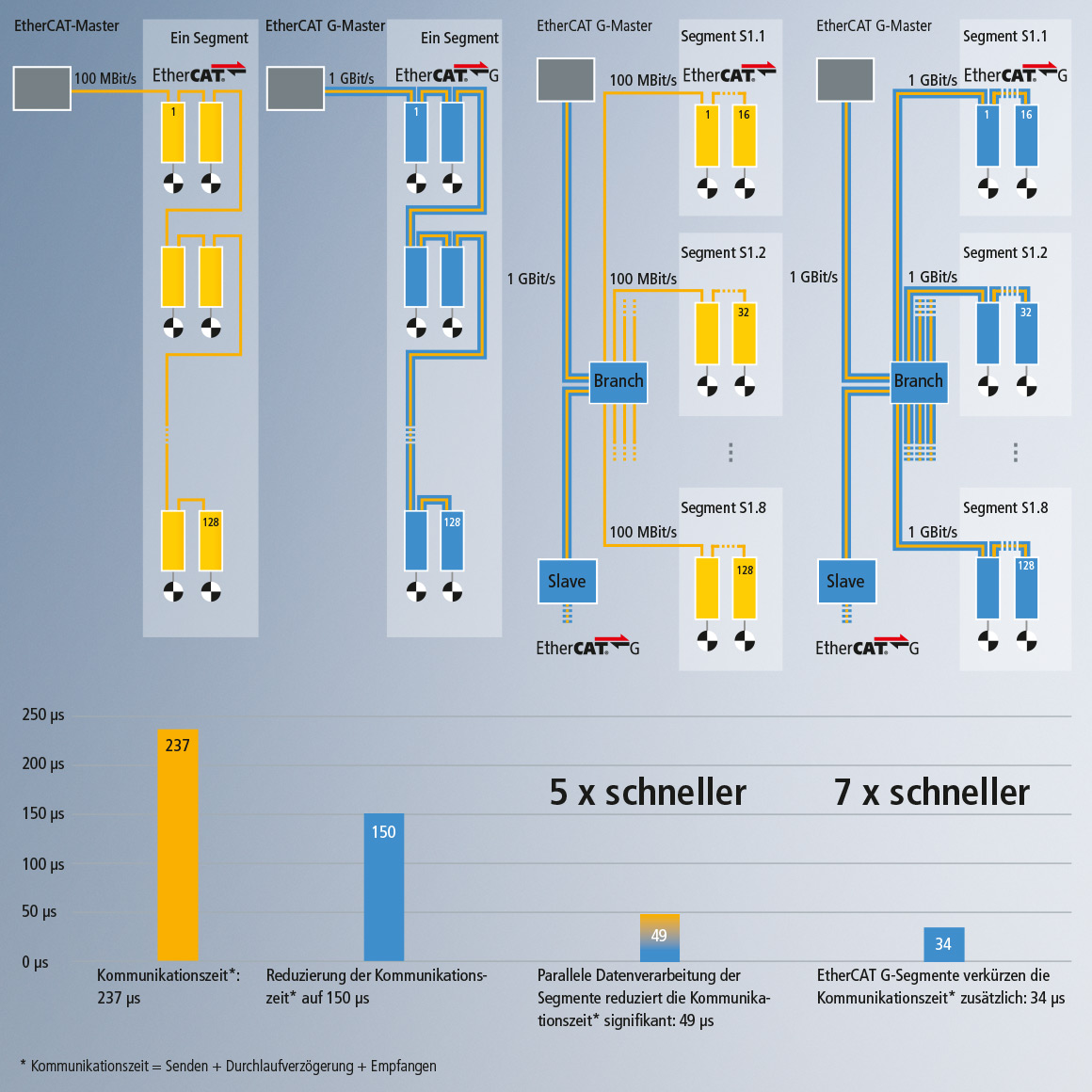
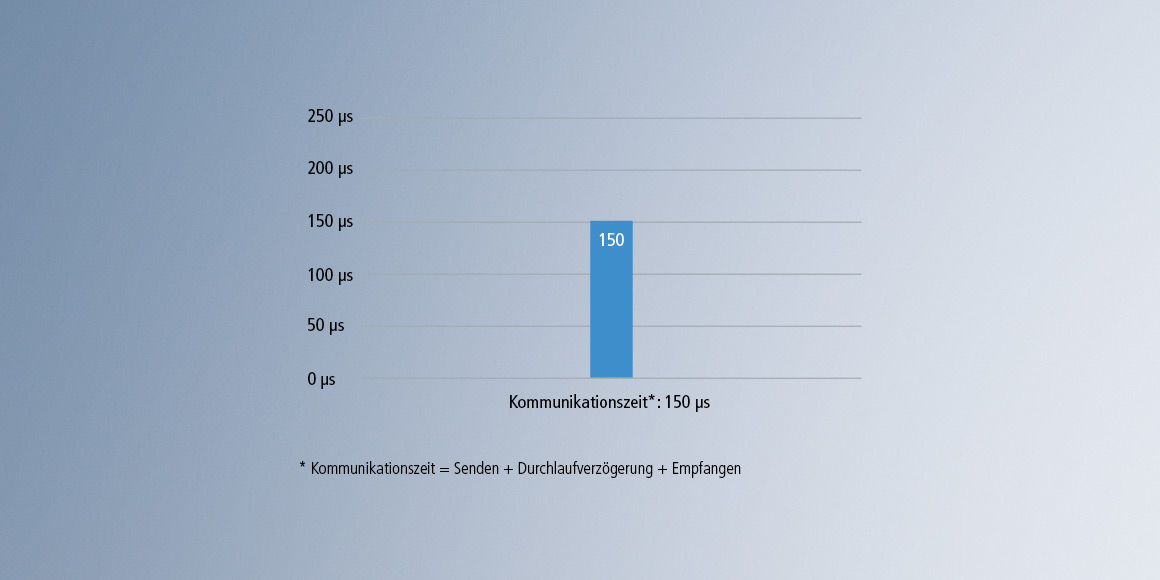
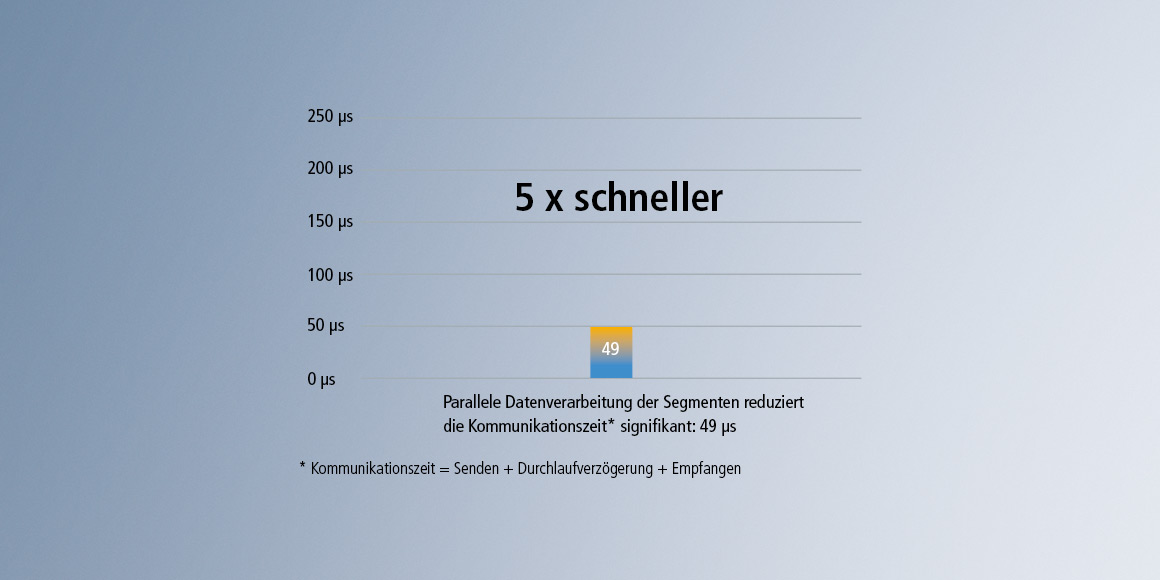
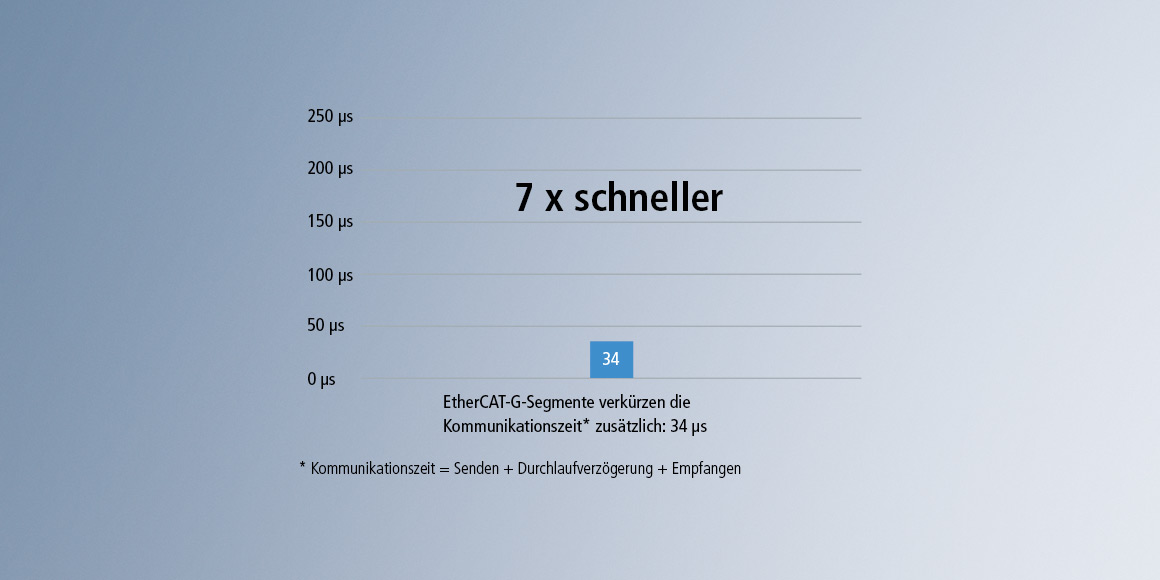
- Parallele Verarbeitung der Segmente reduziert Durchlaufverzögerungen signifikant.
- Durchgängige Diagnose und Synchronisierung sind weiterhin möglich.
EtherCAT ist der Kommunikationsstandard Nr. 1 für die industrielle Automation. Aus einer einzigartigen Vielfalt von tausenden kompatiblen Geräten kann ein Maschinenbauer die benötigten Komponenten einfach auswählen. Die kompatible Einbindung dieser Geräte ist eine Grundvoraussetzung für die Erweiterung auf EtherCAT G/G10. Hierfür ermöglicht das Branch-Konzept die Integration von 100-MBit/s-Ethernet-Segmenten in ein EtherCAT G-Netzwerk. Die Weiterleitung in die Segmente erfolgt prioritäts- und/oder zeitgesteuert. Jeder Abzweig wird dabei als eigenständiges EtherCAT-Segment betrachtet – d. h. ein Telegramm durchläuft nicht alle Segmente nacheinander, sondern die Segmente werden parallel bearbeitet. Dies verringert die Durchlaufzeiten in großen Netzwerken signifikant. Daher sind auch Kombinationen mit Abzweigen von EtherCAT G auf EtherCAT G sinnvoll. Die Konfiguration der Branch Controller erfolgt, wie bei EtherCAT üblich, durch den EtherCAT-Master und erfordert somit keine zusätzlichen Konfigurationswerkzeuge. Diagnose und auch Distributed-Clocks-Synchronisierung werden vom Branch Controller unterstützt und transparent in die angeschlossenen Segmente durchgereicht. Branch Controller mit mehreren Abzweigen können genutzt werden, um flexible Topologien zu realisieren. Ein EtherCAT G-Koppler mit E-Bus schließt ganz einfach alle vorhandenen EL-, ELX- oder ELM-Klemmen an.
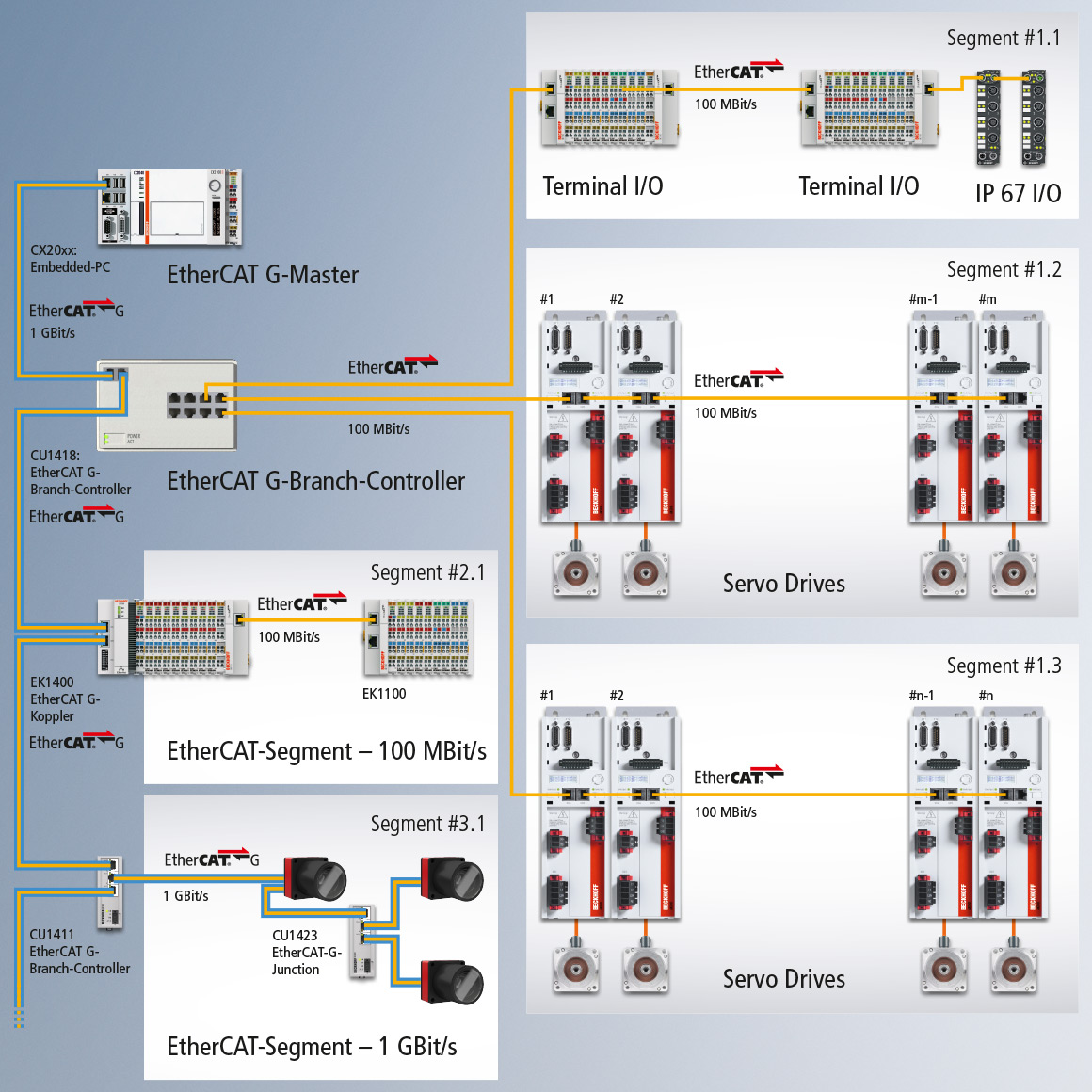
Skalierbar von 100 bis 10.000 MBit/s
Als EtherCAT G-Master können alle Beckhoff Industrie-PCs mit einem Standard-GBit/s-Port genutzt werden. TwinCAT übernimmt die Ansteuerung des Port; für den Anwender ändert sich nichts. Über den 1-Port-Branch-Controller CU1411 können EtherCAT- und EtherCAT G-Netzwerke kombiniert werden. Der Abzweig kann dabei sowohl mit 100 MBit/s als auch mit 1 GBit/s betrieben werden, je nach angeschlossenen Teilnehmern. Der 8-Port-Branch-Controller CU1418 erweitert die Anzahl der Abzweige und erhöht damit die Topologiemöglichkeiten. Zudem können so bis zu acht Abzweige parallel als eigenständige EtherCAT oder EtherCAT G-Segmente betrieben werden, sodass auch bei vielen Teilnehmern kurze Zykluszeiten möglich sind. Im Unterschied dazu ermöglicht die EtherCAT G-Junction CU1423 die einfache Erweiterung der Topologie innerhalb eines Segments ohne eine Änderung der Übertragungsgeschwindigkeit. Die Junction besitzt keine Branch-Funktionalität. Mit dem EtherCAT G-Koppler EK1400 erschließt sich die komplette Vielfalt des Beckhoff EtherCAT-Klemmensystems auch für EtherCAT G-Netzwerke. Selbstverständlich kann die Busstation auch über eine EK1110-Verlängerungsklemme erweitert werden und ein eigenständiges EtherCAT-Segment darstellen.
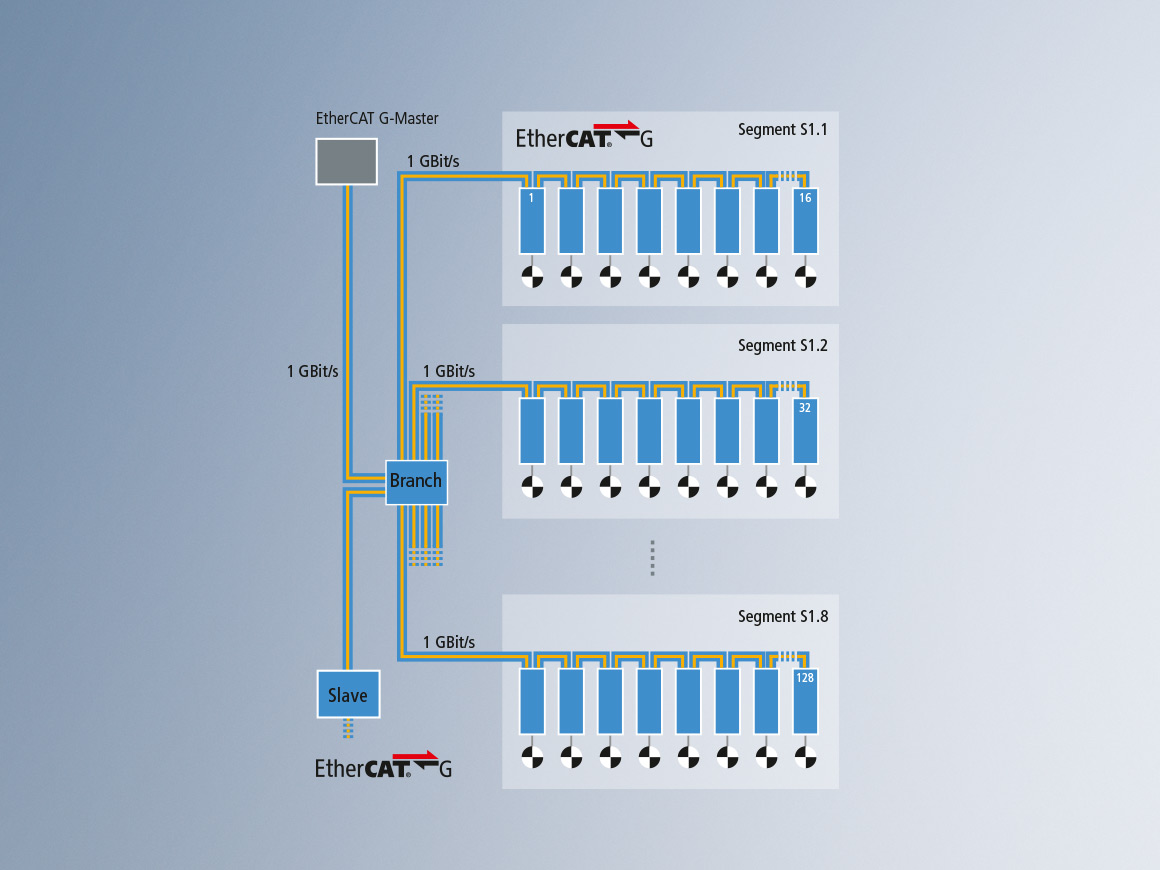
Use Case 1: großes Maschinennetzwerk mit 128 Servoachsen
- je 8 Byte Eingangs-/8 Byte Ausgangsdaten
- 1024 Byte IN/OUT pro Zyklus

Use Case 2 : Messtechnik, Condition Monitoring
- 200 Kanäle ±10 V Analogeingänge mit 100.000 Samples/s (10 μs Messintervall) pro Kanal bei 1 ms Zykluszeit
- 322 MBit/s Nutzdaten-Bandbreite benötigt
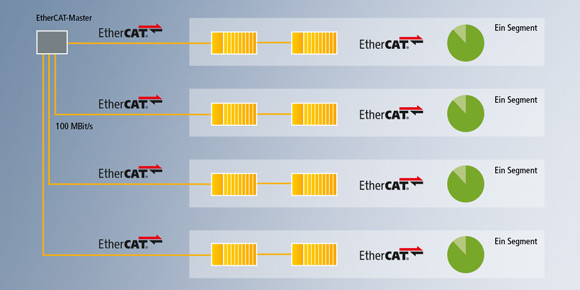
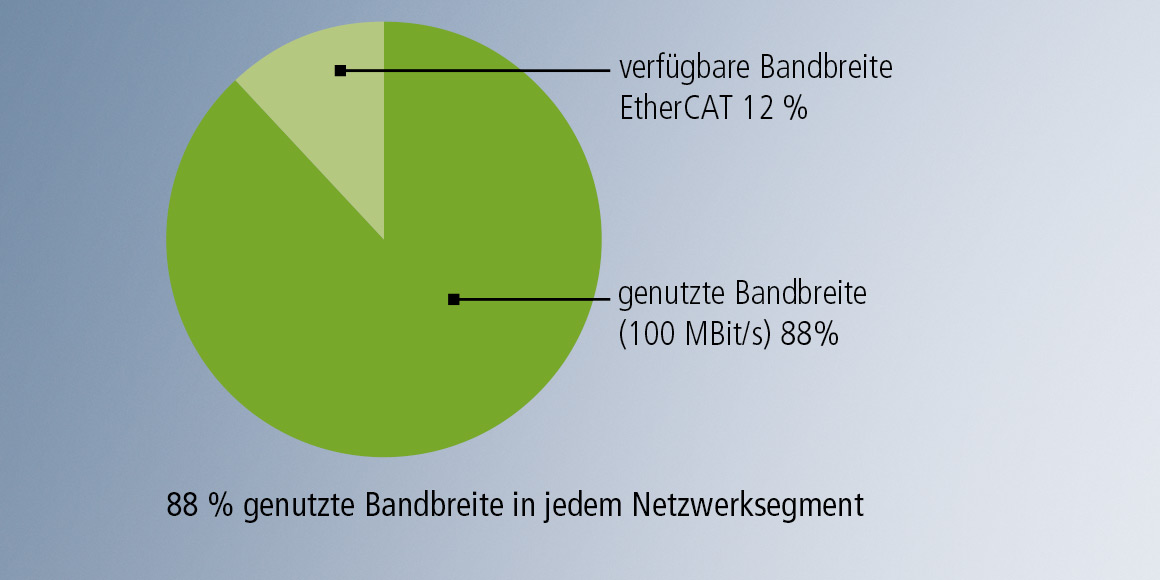
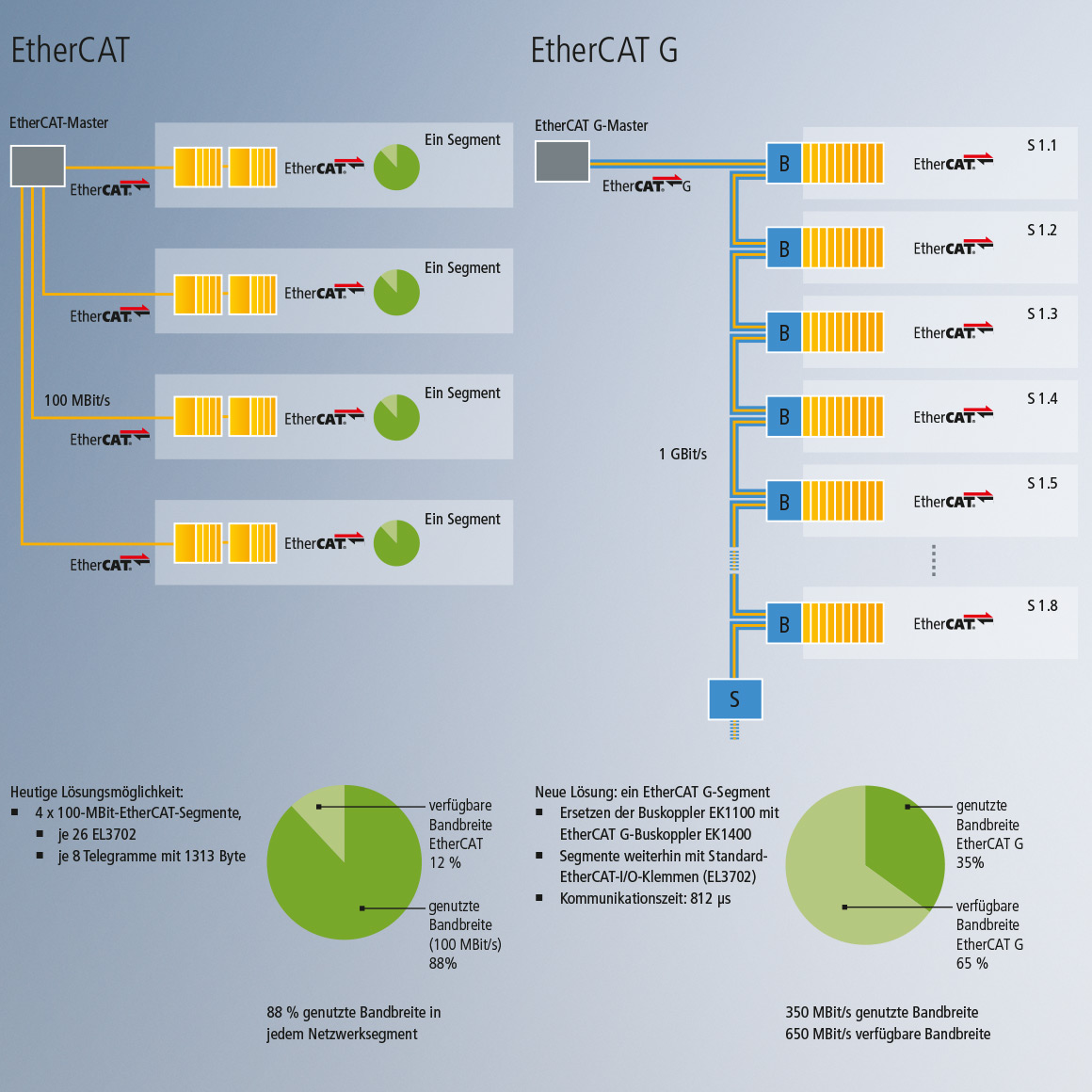
Lösung mit EtherCAT-Master
- 4 x 100-MBit-EtherCAT-Segmente
- je 26 EL3702
- je 8 Telegramme mit 1313 Byte
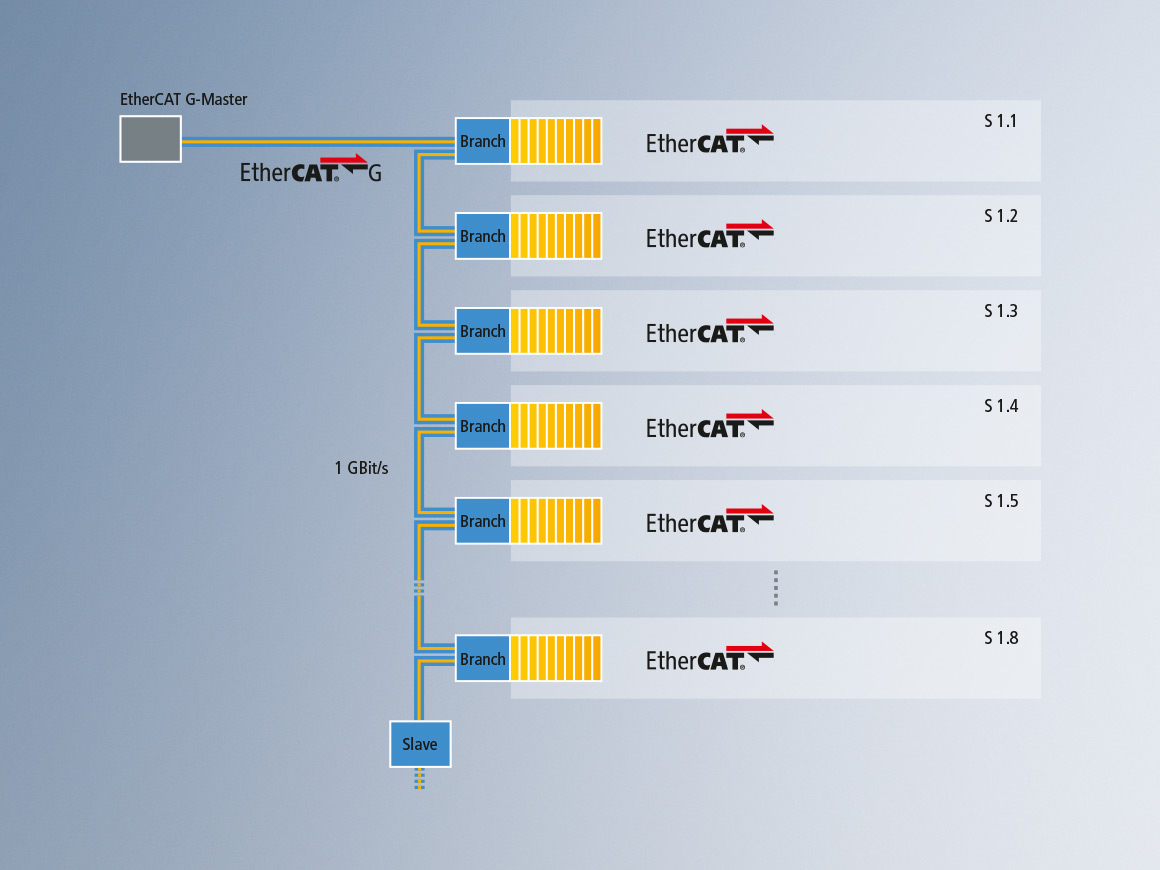
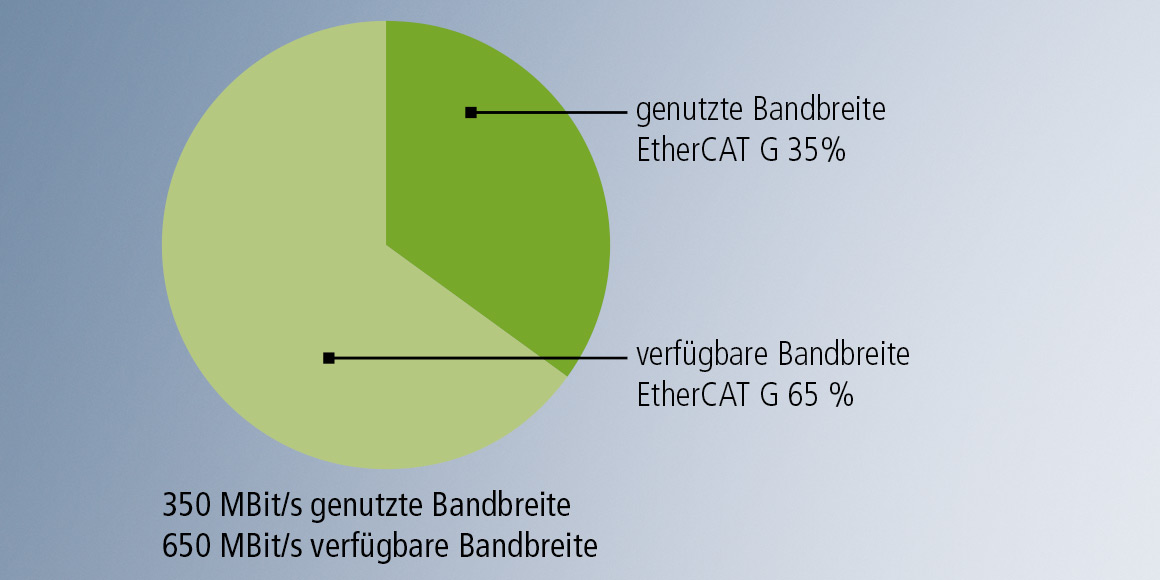
Lösung mit EtherCAT G-Master
- ein EtherCAT G-Segment
- Ersetzen der Buskoppler EK1100 durch EtherCAT G-Buskoppler EK1400
- Segmente weiterhin mit Standard-EtherCAT-I/O-Klemmen (EL3702)
- Kommunikationszeit: 812 μs
EtherCAT G-Produkte

EK1400 | EtherCAT G-Koppler
Der EtherCAT G-Koppler EK1400 verbindet EtherCAT G mit den EtherCAT-Klemmen (ELxxxx). Eine Station besteht aus einem Koppler EK1400, einer beliebigen Anzahl von EtherCAT-Klemmen und einer Busendkappe EL9011 oder einer EtherCAT-Verlängerung EK1110. Der Koppler funktioniert nach dem Prinzip eines Branch Controllers.

CU1411 | Infrastruktur, 1-Port-Branch-Controller, EtherCAT G, 24 V DC, RJ45
Die EtherCAT G-Branch-Controller ermöglichen eine transparente Anpassung der Übertragungsgeschwindigkeit von EtherCAT G und EtherCAT. Der CU1411 hat zwei gekennzeichnete Ports, um die Integration in ein EtherCAT G-Netzwerk zu realisieren. Über einen weiteren Branch-Port kann ein EtherCAT- und/oder EtherCAT G-Segment angekoppelt werden.

CU1418 | Infrastruktur, 8-Port-Branch-Controller, EtherCAT G, 24 V DC, RJ45
Die EtherCAT G-Branch-Controller ermöglichen eine transparente Anpassung der Übertragungsgeschwindigkeit von EtherCAT G und EtherCAT. Der CU1418 hat zwei gekennzeichnete Ports, um die Integration in ein EtherCAT G-Netzwerk zu realisieren. Über acht weitere Branch-Ports können bis zu acht EtherCAT- und/oder EtherCAT G-Segmente angekoppelt werden.

CU1423 | Infrastruktur, 3-Port-Abzweig, EtherCAT G, 1 GBit/s, 24 V DC, RJ45
Der 3-fach-EtherCAT G-Abzweig CU1423 ermöglicht eine Topologieerweiterung ohne Änderung der Übertragungsgeschwindigkeit. Linie, Baum oder Stern: EtherCAT G unterstützt nahezu beliebige Topologien. Mit dem 3-fach-EtherCAT G-Abzweig CU1423 steht eine kompakte Lösung zur Topologieerweiterung eines EtherCAT G-Netzwerks zur Verfügung.

FB1400 | EtherCAT G-Briefmarke
Die EtherCAT G-Briefmarke bietet eine komplette EtherCAT G-Anschaltung auf Basis eines nachladbaren FPGAs. Die FB1400 eignet sich für EtherCAT G-Anschaltungen. Die Briefmarke ist kompatibel zum EtherCAT-Evaluation-Kit EL9820.

FB1450 | EtherCAT G10-Briefmarke
Die EtherCAT G10-Briefmarke bietet eine komplette EtherCAT G10-Anschaltung auf Basis eines nachladbaren FPGAs: Die FB1450 eignet sich für Anschaltungen von EtherCAT G10. Die Briefmarke ist kompatibel zum EtherCAT-Evaluation-Kit EL9820.

ZK1096-8191-0xxx | Industrial-Ethernet/EtherCAT G/G10-Leitung, Cat.6/Cat.6A, PUR, 4 x 2 x AWG26, feste Verlegung
M12, Stecker, gerade, Stift, 8-polig, X-kodiert – RJ45, Stecker, gerade, Stift, 8-polig