
EP7041-0002 | EtherCAT Box, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 5 A, M12, mit Inkremental-Encoder


connection
2 | Rx+
3 | Rx-
4 | Tx-
2 | A2
3 | B1
4 | B2
5 | n.c.
3, 4 | GND Motor
5 | n. c.
2 | Input B
3 | GND
4 | Input A
5 | Output
2 | V Enc
3 | A Enc
4 | B Enc
5 | C Enc
2 | +24 V DC UP
3 | GND
4 | GND

EP7041-0002 | EtherCAT Box, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 5 A, M12, mit Inkremental-Encoder
Dezentrale, absolute Systemsynchronisation: Mit Distributed-Clocks und EtherCAT.
Kompakte Antriebstechnik

Die EtherCAT Box EP7041 ist für den direkten Anschluss unterschiedlicher Schrittmotoren vorgesehen. Die PWM-Endstufen für zwei Motorspulen sind bei geringster Bauform, zusammen mit zwei Eingängen für Endlagenschalter, in der Baugruppe untergebracht und decken einen großen Spannungs- und Strombereich ab. Mit einigen Parametern kann die EP7041 an den Motor und die Anwendung angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt. Durch den Anschluss eines Inkremental-Encoders ist die Realisierung einer einfachen Servoachse möglich. Zwei digitale Eingänge und ein digitaler 0,5-A-Ausgang erlauben die Verbindung von Endschaltern und Motorbremse.
Produktstatus:
Serienlieferung
Produktinformationen
| Technische Daten | EP7041-0002 |
|---|---|
| Protokoll | EtherCAT |
| Businterface | 2 x M8-Buchse, 4-polig, A-kodiert, geschirmt |
| Anzahl Ausgänge | 1 Schrittmotor, 1 digitaler 24-V-DC-Ausgang |
| Anzahl Eingänge | 2 digitale Eingänge, Gebersystem (24-V-DC-Encoder) |
| Anschlusstechnik | M12-Buchse, 5-polig, A-kodiert |
| Lastart | 2-Phasen-Schrittmotor (uni-/bipolar) |
| Nennspannung | 8…48 V DC |
| Ausgangsstrom | 2 x 3,5 A, 2 x 5-A-Spitzenstrom (überlast- und kurzschlussfest) |
| Distributed Clocks | ja |
| Schrittfrequenz | konfigurierbar bis zu 8000 Vollschritte/s |
| Schrittmuster | 64-fach-Microstepping |
| Stromreglerfrequenz | ca. 30 kHz |
| Diagnose-LED | Fehler Strang A und B, Schrittverlust/Stillstand, Power, Enable |
| Auflösung | ca. 5000 Positionen (pro Umdrehung, je nach Motor- und Encodertyp) |
| Anschluss Spannungsversorg. | Einspeisung: 1 x M8-Stecker, 4-polig, A-kodiert; Weiterleitung: 1 x M8-Buchse, 4-polig, A-kodiert |
| Potenzialtrennung | 500 V |
| Stromaufnahme aus US | 120 mA |
| Besondere Eigenschaften | Fahrwegsteuerung, Encodereingang |
| Gewicht | ca. 165 g |
| Betriebstemperatur | -25…+60 °C |
| Lagertemperatur | -40…+85 °C |
| Schwingungs-/Schockfestigkeit | gemäß EN 60068-2-6/EN 60068-2-27 |
| EMV-Festigkeit/-Aussendung | gemäß EN 61000-6-2/EN 61000-6-4 |
| Schutzart/Einbaulage | IP65/66/67 (gemäß EN 60529)/beliebig |
| Zulassungen/Kennzeichnungen | CE, ATEX, IECEx |
| Ex-Kennzeichnung | ATEX: II 3 G Ex ec IIC T4 Gc II 3 D Ex tc IIIC T135 °C Dc IECEx: Ex ec IIC T4 Gc Ex tc IIIC T135 °C Dc |
| Gehäusedaten | 8 x M8, 4 x M12 |
|---|---|
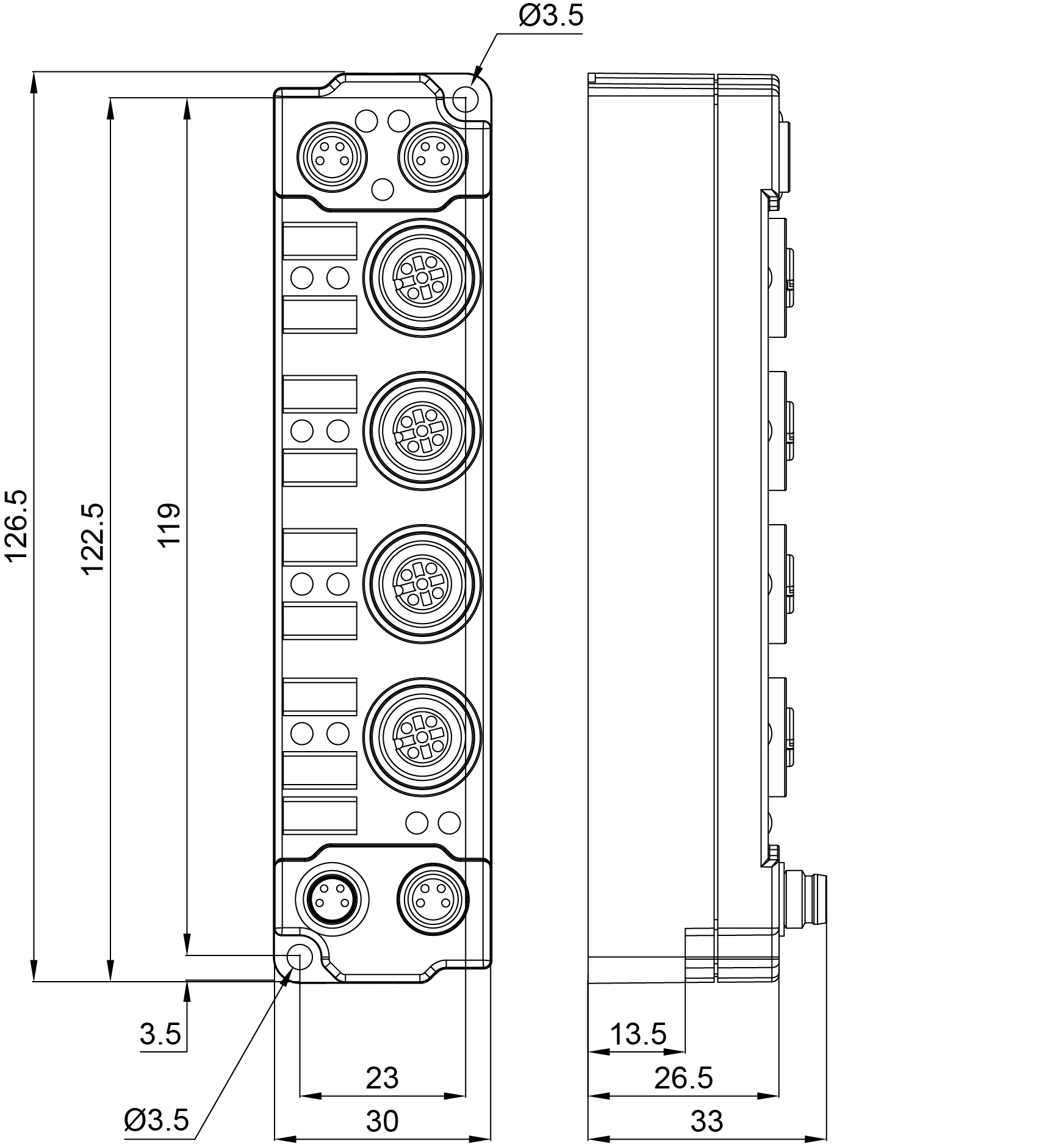
| Abmessungen (B x H x T) | 30 mm x 126 mm x 26,5 mm |
| Material | PA6 (Polyamid) |
| Montage | 2 x Befestigungslöcher Ø3,5 mm für M3 |
Inhalte werden geladen ...
Inhalte werden geladen ...
Inhalte werden geladen ...
Inhalte werden geladen ...
Inhalte werden geladen ...
© Beckhoff Automation 2026 - Nutzungsbedingungen