PC-based Control als Kern eines Demokoffers für das Hochschulstudium
Die an der Hochschule Heilbronn entwickelte IDEA-Box (Industrial Digitalization in Education of Automation) soll den Studierenden auf einfache und praxisnahe Weise das Thema Industrie 4.0 näherbringen. Kern des entsprechenden Demokoffers bildet PC-based Control von Beckhoff, mit dem Ultra-Kompakt-Industrie-PC C6015, TwinCAT sowie EtherCAT-Klemmen als flexibles I/O-System.
Der „Zauberkoffer voller Zukunftstechnologien“ – so Prof. Dr. Thomas Pospiech, Initiator des Projekts – kommt Studierenden aus der technischen Fakultät von der Hochschule Heilbronn (HHN) zugute. Mit ihm lassen sich zahlreiche industrielle Anwendungsfälle der zunehmenden Verschmelzung von IT und Automatisierung direkt im Hörsaal realisieren und lösen.
Die Idee hinter der IDEA-Box
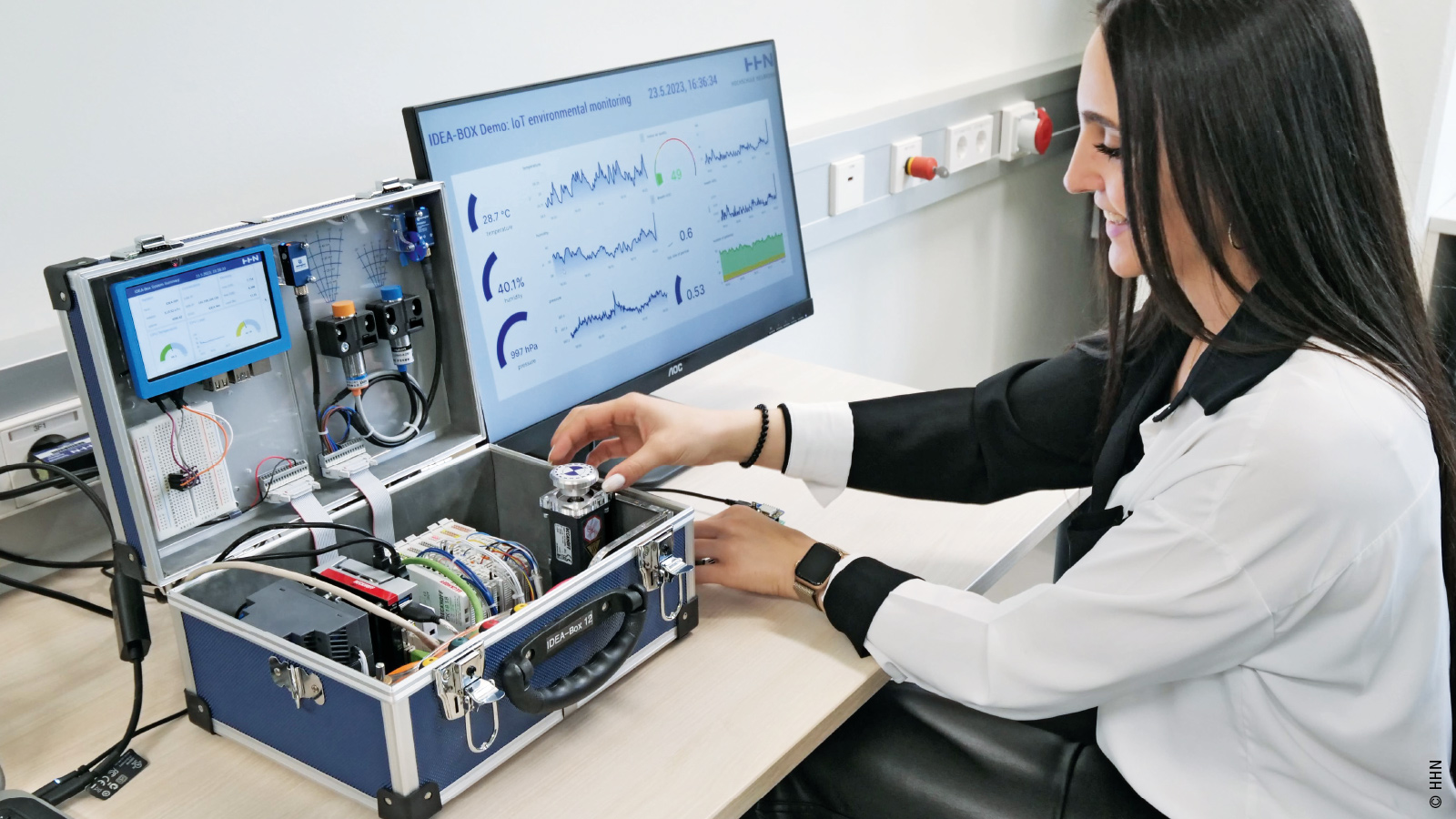
Die Studierenden bauen ihre eigenen elektrischen Schaltungen mit Sensoren auf und programmieren die IDEA-Box, um die Sensorsignale einzulesen und weiterzuverarbeiten. Ergebnis kann die grafische Darstellung des zeitlichen Verlaufs der Messgrößen sein, die Alarmausgabe auf allen IDEA-Boxen im Hörsaal bei Unter- oder Überschreitung von Grenzwerten oder das Ansteuern eines Motors in der Box. Die Datenkommunikation wird dabei per Internet auf die Smartphones der Studierenden übertragen. Die flexiblen Nutzungsmöglichkeiten der IDEA-Box sollen insbesondere auch die Umsetzung eigener studentischer Ideen ermöglichen.
Insgesamt deckt der Demokoffer alle Grundlagen der klassischen Automatisierungstechnik ab: von der Datenerfassung und -verarbeitung z. B. über kapazitive und induktive Näherungsschalter bis hin zu einfachen Einachs-Positionieraufgaben. Prof. Dr. Thomas Pospiech ergänzt dazu: „Dabei sind durchaus auch zeitkritische Anwendungen möglich, welche die Studierenden Erfahrungen im Grenzbereich der Steuerungszykluszeit machen lassen.“
Die IDEA-Box ist als kleiner Koffer mit ca. 9 l Volumen umgesetzt und beinhaltet neben dem Ultra-Kompakt-Industrie-PC C6015, einem EtherCAT-Koppler EK1818 und mehreren EtherCAT-Klemmen (z. B. EL3174, EL7047 und EL7211) noch einen Einplatinen-Computer Raspberry Pi sowie die Sensorik und Aktorik. So können die Studierenden neben einem Synchron-Servomotor auch Gleichstrom- und Schrittmotoren in Betrieb nehmen. Verschiedene Schnittstellen und Steckplätze ermöglichen außerdem die Anbindung und Vernetzung von eigenen Entwicklungen – beispielsweise mit Mikrocontrollern. Damit können Konzepte der cyber-physikalischen Systeme nicht nur erklärt, sondern von den Studierenden tatsächlich realisiert werden.
Systemoffenheit durch PC-based Control
Zur hohen Flexibilität trägt auch die Erweiterbarkeit bei, indem beispielsweise die beiden derzeitigen Module im Kofferdeckel – mit der Sensor- bzw. der Mikrocontrollertechnik – durch Neuentwicklungen ausgetauscht werden. Auf diese Weise lassen sich neue Lerninhalte z. B. mit einem Bildverarbeitungsmodul einbinden, ohne die IDEA-Box komplett umbauen zu müssen. Ebenso flexibel wie der Aufbau ist auch die zum Einsatz kommende Kommunikationstechnik, um den Studierenden möglichst viele technische Anforderungen zu vermitteln. So kommuniziert der C6015 beispielsweise per EtherCAT mit den I/O-Klemmen und über MQTT mit Cloud-Lösungen. ADS, OPC UA, Modbus, WLAN und der I2C-Datenbus sind ebenfalls realisiert.
Eine solche Systemoffenheit ist für Prof. Dr. Thomas Pospiech unerlässlich, um den Studierenden ein möglichst breites Spektrum vermitteln zu können: „Diese Offenheit für jede Software und alle Technologien, die auf uns zukommen können und daher auch gelehrt werden müssen, schätze ich besonders an PC-based Control von Beckhoff. Der Industrie-PC ist hierfür ganz einfach optimal geeignet. Zumal nur mit dem IPC eine derartige Funktionalität bei solch einer hohen Packungsdichte zu erreichen ist. Hinzu kommt als großer Vorteil, dass sich mit TwinCAT auch weitere Softwarepakete wie z. B. MATLAB®/Simulink® einfach und voll integriert nutzen lassen.“
Erstmals zum Einsatz kam die IDEA-Box zum Semesterbeginn 2020, was laut Prof. Dr. Thomas Pospiech einen eher unerwarteten Vorteil des äußerst kompakten Demokoffers in den Vordergrund rückte: „Mit Beginn der Corona-Pandemie haben wir sehr schnell auf Online-Vorlesungen umgestellt, mit dem immensen Vorteil, dass die Studierenden die IDEA-Box einfach mit nach Hause nehmen und dort genauso praxisnah wie an der Hochschule arbeiten konnten.“
Erweiterung um Mehrachs-Motion und Robotik
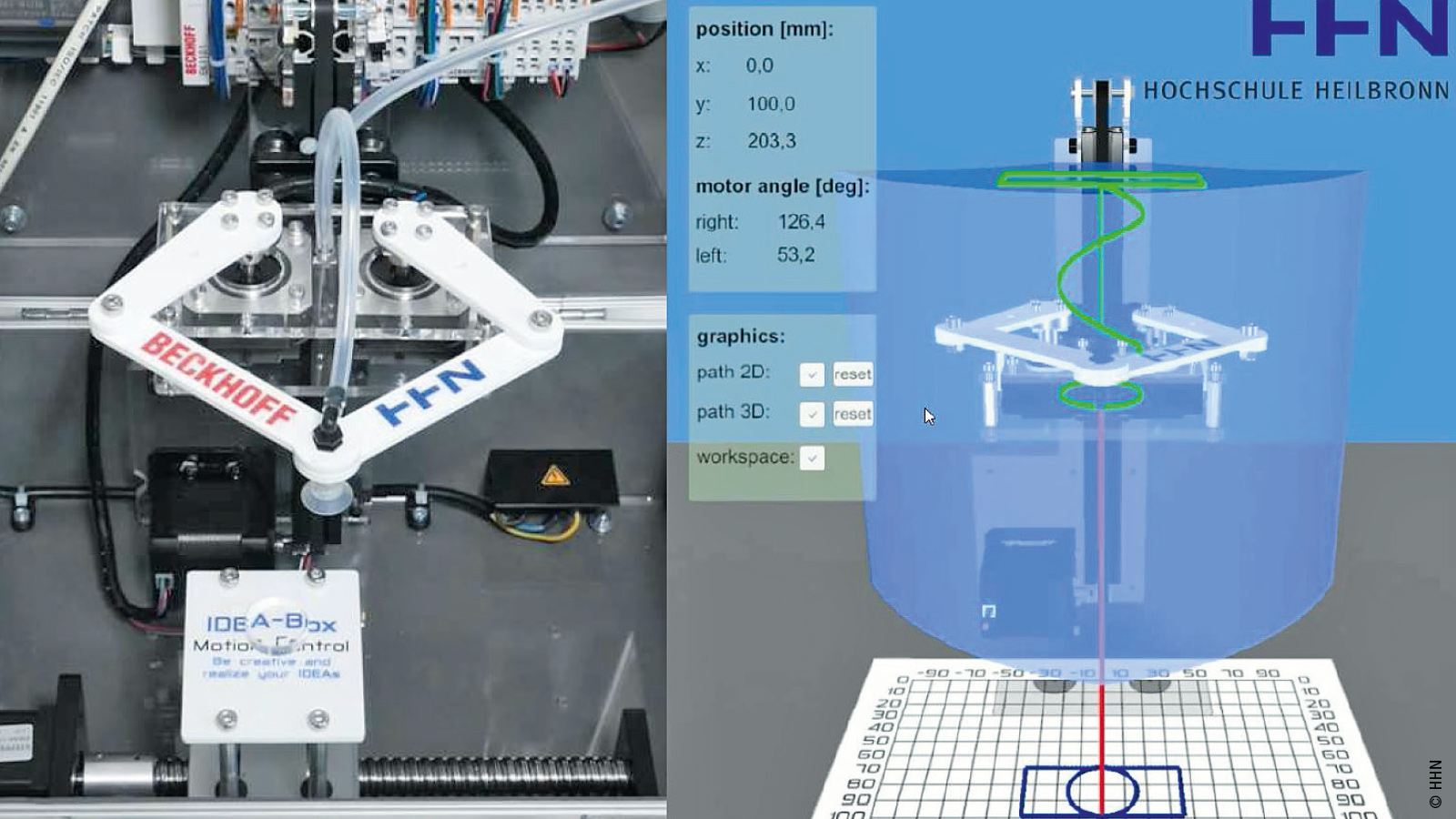
Um auch Mehrachs-Bewegungen und Robotik-Kinematiken vermitteln zu können, wurde die Erweiterungs-Box „Motion Control“ entwickelt. Diese enthält im Kofferdeckel die erforderliche Stromversorgung sowie EtherCAT-Koppler und -Klemmen. Hinzu kommen ein einzelner Schrittmotor, eine Zweiachs-Kinematik und im Kofferinneren zwei unterschiedliche Linearachsen, davon eine mit einer Pendelmechanik. Als Steuerungsintelligenz dient der C6015 der angebundenen IDEA-Basis-Box. Dazu erläutert Prof. Dr. Thomas Pospiech: „Es lässt sich beispielsweise anhand eines Schrittmotors mit Spindel sehr gut die rein mathematische Programmierung mit den Mechanikeigenschaften verbinden, um das mechatronische Gesamtsystem mit den Aspekten Motor, Drehbewegung, Spindel bzw. Spindelsteigung und Vorschub oder Referenzfahrt optimal zu verdeutlichen. Und hierbei zeigt sich ein großer Vorteil von TwinCAT, denn unterschiedlichste Motoren – egal ob Schritt- oder Servomotor – werden in der Software genau gleich gehandhabt. Den Studierenden kann also das erforderliche Wissen anhand eines Motors vermittelt werden und anschließend können sie das Erlernte einfach auf einen anderen Motor übertragen, um es zu vertiefen.“
Komplexere Funktionen, wie z. B. Kurvenscheiben, Anti-Schwingungsalgorithmen und resonanzfreies Positionieren, lassen sich mit der Motion-Control-Box und der Linearachse mit Pendelmechanik ebenfalls umsetzen. Zumal auch hier der modulare Aufbau konsequent weitergeführt ist, d. h. die Achsen lassen sich einfach austauschen, um beispielsweise ein regelungstechnisches Modell anhand des Balancierens eines Balls zu verstehen. Mit der Dual-Scara-Kinematik sollen in erster Linie die Themen manuelle Referenzierung sowie Vorwärts- und Rückwärtstranformation vermittelt werden. Durch die Kombination mehrere Achsen lässt sich die Komplexität sogar noch steigern, indem durch einen einfachen Umbau z. B. die Roboterkinematik und die Spindelachse zu einer Pick-and-Place-Einheit kombiniert werden.
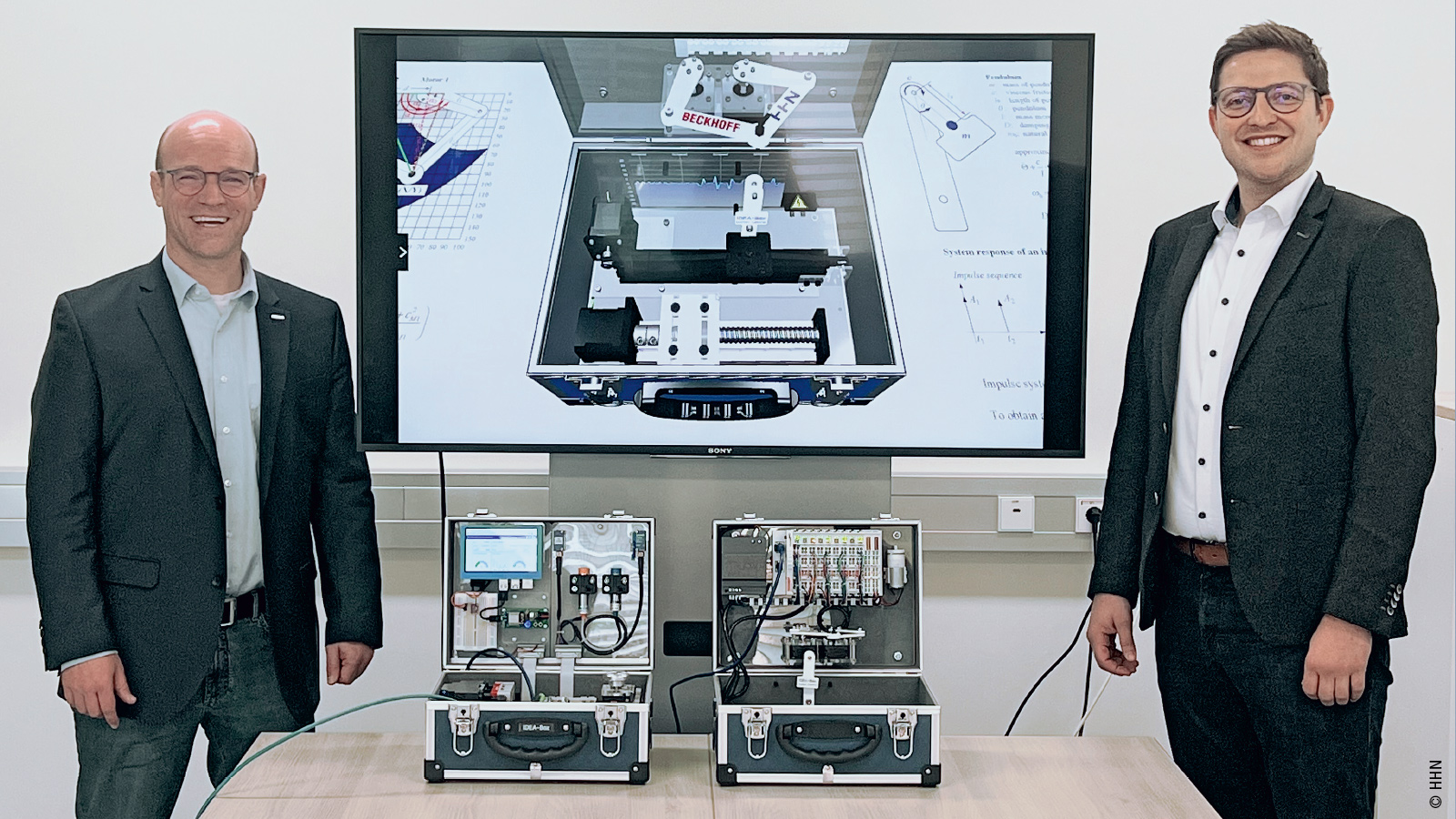
Per Modell-Integration zum digitalen Zwilling
Ein CAD-Modell der Motion-Control-Box, das sich kinematisch mit dem SPS-Programm verknüpfen lässt, ermöglicht den Studierenden erste Erfahrungen mit einem digitalen Zwilling. Für Prof. Dr. Thomas Pospiech ist dies gerade mit Blick auf die Zukunft von Bedeutung: „Durch die virtuelle Inbetriebnahme des digitalen Maschinen-Zwillings können Entwicklungsschritte vorgezogen und nachfolgende Bearbeitungsschritte parallelisiert werden – eine Voraussetzung, damit der Produktionsstandort Deutschland global betrachtet wettbewerbsfähig bleibt. Und genau hierfür sollen unsere Studierenden bestmöglich ausgebildet sein.“
Dabei bietet TwinCAT laut Prof. Dr. Thomas Pospiech erneut mit seiner Offenheit deutliche Vorteile: „Die Schwingung des Pendels beispielsweise wird nicht über eine Sensorik aufgenommen, sondern ist über ein entsprechendes, direkt in TwinCAT integriertes MATLAB®/Simulink®-Modell simuliert. Insgesamt laufen auf dem Ultra-Kompakt-Industrie-PC C6015 fünf solcher physikalischen Verhaltensmodelle ab, u. a. auch für flexible Bauteile wie der Zahnriemen. Die Kommunikation des digitalen Zwillings mit der Steuerung läuft bidirektional über TwinCAT ADS.“ Dabei können durch die Integration von virtuellen Sensoren im zugrunde liegenden Unity-Modell sämtliche geometrischen Abstände der bewegten Bauteile- oder auch Baugruppen ermittelt werden. So lassen sich beispielsweise Kollisionen erkennen und Arbeitsräume von Robotern dynamisch überwachen. Die Informationen können im Unity-Modell generiert und über die Rückführung zur SPS kommuniziert werden. In der Steuerung werden diese wiederum verarbeitet und entsprechende Funktionen zum Ergreifen geeigneter Maßnahmen ausgeführt.
Entwickelt wurde die IDEA-Box speziell für den Einsatz in der Lehre. Es habe sich in den vergangenen Jahren aber gezeigt, dass das System auch für die Industrie sehr interessant ist, um in den unterschiedlichsten Bereich möglichst schnell zu passenden Lösungen zu kommen. Außerdem stellt die Hochschule Heilbronn alle im Rahmen der Vorlesungen erstellten Programme frei zur Verfügung, um die Box möglichst weit verbreiten und so insbesondere junge Menschen für die technischen Berufe begeistern zu können. Dazu sollen auch weitere Ausbaustufen beitragen, beispielsweise die Steuerung einer Sechsachs-Kinematik per Augmented Reality.
Weitere Informationen




