PC-based 控制技術助推車輛電動化改裝
對於單件小批量生產商和擁有大量相似車型的製造商來說,能夠依靠快速、靈活和高性價比的綜合檢測測試平台技術非常重要。德國肯普滕應用技術大學就為 ABT e-Line公司開發實施一個類似的測試平台,用於檢測各種車型的性能,像是已轉換用電力驅動的福斯(Volkswagen)廂型車。倍福PC-based控制技術的核心特徵之一是使用標準工業元件。
肯普滕應用技術大學(HS Kempten)研發的測試平台主要用於測試車輛功能。該測試平台是在肯普滕應用技術大學專門研究汽車和自動化領域應用及開發課題的控制工程和車輛系統實驗室中開發而成。實驗室最初成立於 2016 年,主要測試單個零件的可靠性,後來逐漸擴大至複雜的完整系統測試平台,除了研究之外,甚至包括教學活動。
測試平台不僅可以測試新車和新功能,而且還能檢查各個功能如何相互影響。另一個優點是,車輛可以在其原有的適於行駛的狀態下進行測試,不需要像傳統測試平台進行改裝。
肯普滕大學 Allgäu 研究中心的研究助理 Florian Zerbes 在介紹測試範圍和過程時說道:「對於電動車,測試平台主要測試透過高壓電池供給電力的空氣調節系統,是否會對車輛最重要的功能產生影響,例如:開啟、關閉與行駛。測試內容包括規定測試週期,反復啟動、停止車輛以及加速。車輛狀態會因測試結果發生變化,即打開或關閉空氣調節系統,電池的充電水準也因此改變。透過肯普滕大學的測試平台,該測試過程可以完全獨立地運行幾個小時甚至幾天。這個過程包括連續紀錄測試平台和車輛中的數據,以便進行數據分析並轉化為最終的測試結果。」
測試平台結構
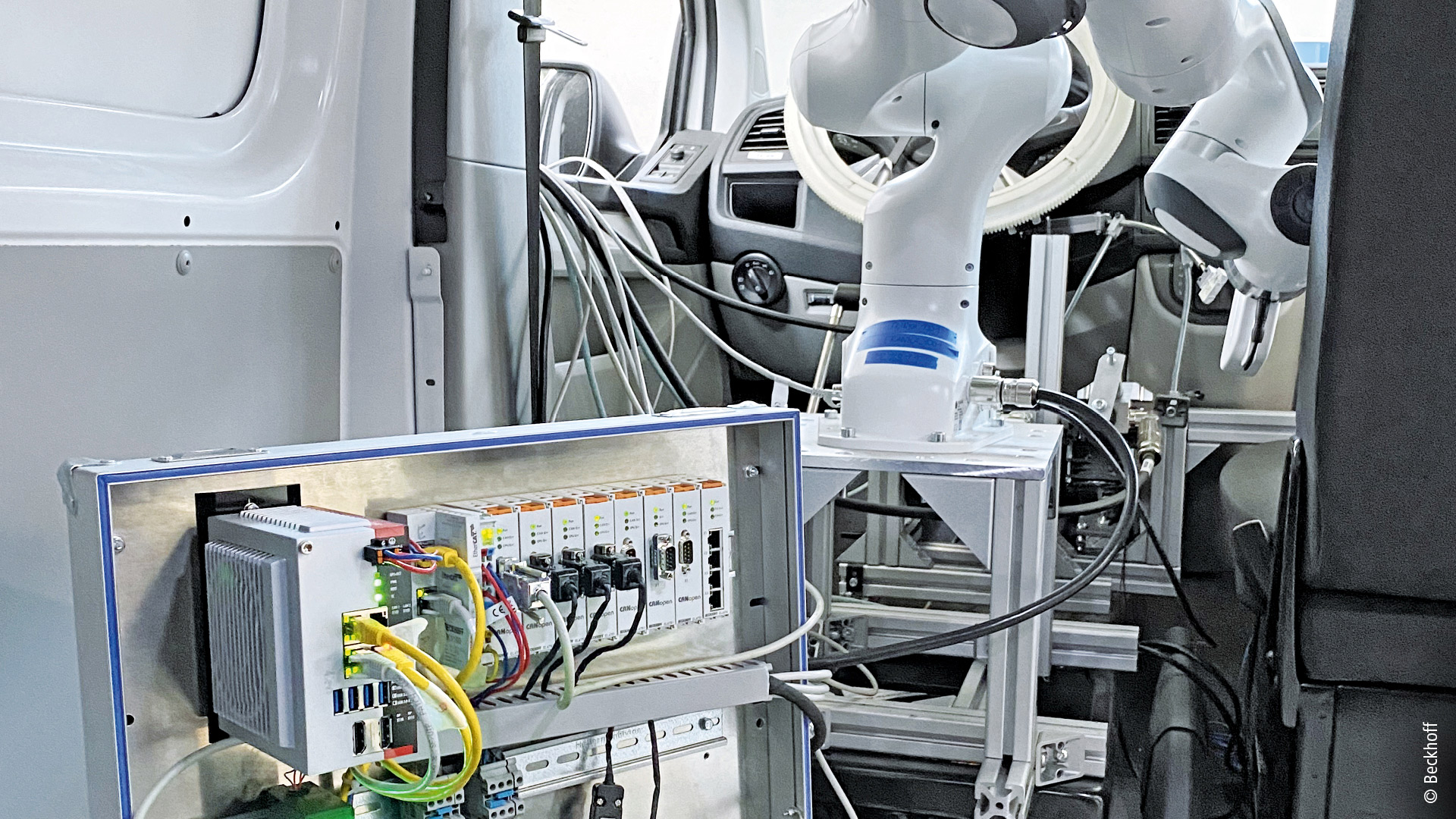
與車輪連接的馬達輸出軸提供車輪滾動阻力,模擬車輛在道路上行駛。車輛內的機器人轉動點火鑰匙,進行換擋操作,以及操控車內的各個按鈕,例如車內氣候控制系統的按鈕。踏板上的線性馬達踩下油門和刹車踏板,而轉向馬達則轉動方向盤。車外的第二個機器人將各種充電線插入充電插座和從充電插座拔出。

測量模組用於取得車內線束的電流和電壓,以便進行後續分析。配有 TwinCAT 的倍福 C6030 超緊湊型工業 PC 作為控制平台,負責各元件和車輛(透過 CAN 總線)之間的通訊。中央控制單元用於協調控制各個元件,可以使用不同的程式進行各種不同的測試。9 個能夠整合任何 CAN 和 CANopen 設備的 EL6751 EtherCAT 單通道通訊介面端子模組確保將 CAN 設備無縫整合到 EtherCAT 控制系統中。
在測試過程中,車輛會在真實的道路駕駛條件下進行模擬。駕駛測試平台會根據模擬轉矩轉動車輪,甚至可以模擬車輪轉向運動。這種模擬試驗真實度極高,可以使用相應的執行機構模擬駕駛員的動作。大部分動作由工業機器人執行,盡可能完成多種的不同動作。測試平台可以模擬現實環境,以及車輛如何與周圍環境進行通訊,例如透過 GPS 系統。肯普滕應用技術大學除了成功開發測試平台外,還為系統打造了一個數位分身平台。這不僅有利於實現測試平台的預試車,而且還能夠實現全面的系統視覺化和監測。
工業技術降低成本、提升靈活性
肯普滕應用技術大學在開發新的測試平台時,主要考慮如何讓系統盡可能地具有成本效益。這主要是透過使用轉換器、馬達和控制裝置等標準工業元件實現。另一個考慮因素是確保系統能夠快速安裝和移除,而且基本上不受車輛影響。因此,測試平台必須能夠靈活地根據應用需求進行調整。

肯普滕應用技術大學的機械工程教授 Andreas Stiegelmeyr 博士在描述系統要求及具體實施情況時說道:「我們開發一款能夠使用標準車輛介面測試大部分車輛功能的測試平台,無論是什麼車型,都能夠透過快速連接、以最小的投入,測試車輛的各個功能。我們打造一個很好的選擇,適用於車型眾多的汽車製造商,尤其是小批量汽車製造商。」
Florian Zerbes 補充說道:「由於倍福控制產品配備很多不同的工業元件介面,因此我們選擇幾款產品,打造中央控制系統。更重要的是,透過增加 EtherCAT 端子模組可以輕鬆擴展控制系統,再加上 EtherCAT 拓撲結構非常靈活,可以根據空間情況進行優化佈署。同時,倍福可提供大量軟硬體產品,這代表可以輕鬆完成大量測量和控制任務。最重要的是,倍福PC-based控制技術相對於汽車領域使用的很多系統,具有明顯的成本優勢。」
用於確定測試序列的工具鏈
測試序列使用專門開發的工具鏈在結構化文本(ST)中編寫,並使用 MATLAB®/Simulink® 生成。這樣可以將 TwinCAT 和 Simulink® 有效地結合使用。Florian Zerbes 說道:「透過 Simulink® 可以自動生成包含硬體連接資訊的功能塊。在編譯各自模型時,可以透過 TwinCAT Automation Interface 自動設置相應的硬體連接,並在模型和硬體之間創建一個鏈路層。」新的工具鏈提供以下功能:
- 毫不費力地建立所需的 Simulink® 模型
- 輕鬆使用不同的資料庫
- 自動連接硬體,並直接在 Simulink® 模型中配置
- 為使用者提供簡潔明瞭的介面
工具鏈目前的重點是 CAN 總線,這意味著,可以透過 DBC 檔案快速創建 CAN 區塊。然後,像這樣的功能塊可以直接連接模型的其它部分,並且可以在 Simulink® 中配置硬體介面。使用者可以透過 GUI 配置各個資訊,並在 Simulink® 中直接配置硬體的其它介面。一旦 Simulink® 模型建立完畢,就可以透過工具鏈輕鬆連接 TwinCAT。使用者需要做的只是決定哪個 Simulink® 模型與哪個 TwinCAT 專案相連。一切都能自動完成,同時,還可以調整 TwinCAT 專案使用的硬體或 PLC 專案的實施等。