
EPP7041-1002 | EtherCAT P Box, 1-channel motion interface, stepper motor, 48 V DC, 1.5 A, M12, with incremental encoder


2 | Rx+/GNDP
3 | Rx-/UP
4 | Tx-/US
2 | A2
3 | B1
4 | B2
5 | n.c.
3, 4 | GND Motor
5 | n. c.
2 | Input B
3 | GNDS
4 | Input A
5 | Output
2 | V Enc
3 | A Enc
4 | B Enc
5 | C Enc

EPP7041-1002 | EtherCAT P Box, 1-channel motion interface, stepper motor, 48 V DC, 1.5 A, M12, with incremental encoder

EtherCAT P: The one cable solution – One step closer to automation without control cabinets

The EPP7041-1002 EtherCAT P Box is intended for the direct connection of different Stepper Motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EPP7041-1002 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.
Product status:
regular delivery
Product information
| Technical data | EPP7041-1002 |
|---|---|
| Protocol | EtherCAT |
| Bus interface | 2 x M8 socket, P-coded, shielded |
| Number of outputs | 1 stepper motor, 1 digital 24 V DC output |
| Number of inputs | 2 digital inputs, encoder system (24 V DC encoder) |
| Connection technology | M12 socket, 5-pin, a-coded |
| Load type | 2-phase stepper motor (uni-/bipolar) |
| Nominal voltage | 8…48 V DC |
| Output current | 2 x 1 A, 2 x 1.5 A peak current (overload- and short-circuit proof) |
| Distributed clocks | yes |
| Step frequency | configurable up to 8000 full steps/s |
| Step pattern | 64-fold micro stepping |
| Current controller frequency | approx. 30 kHz |
| Diagnostics LED | error phase A and B, loss of step/stagnation, power, enable |
| Resolution | approx. 5000 positions (per revolution) |
| Current consumption from US | typ. 100 mA |
| Special features | travel distance control, encoder input |
| Weight | approx. 165 g |
| Operating temperature | -25…+60°C |
| Storage temperature | -40…+85°C |
| Vibration/shock resistance | conforms to EN 60068-2-6/EN 60068-2-27 |
| EMC immunity/emission | conforms to EN 61000-6-2/EN 61000-6-4 |
| Protect. rating/installation pos. | IP65/66/67 (conforms to EN 60529)/variable |
| Approvals/markings | CE |
| Housing data | 8 x M8, 4 x M12 |
|---|---|
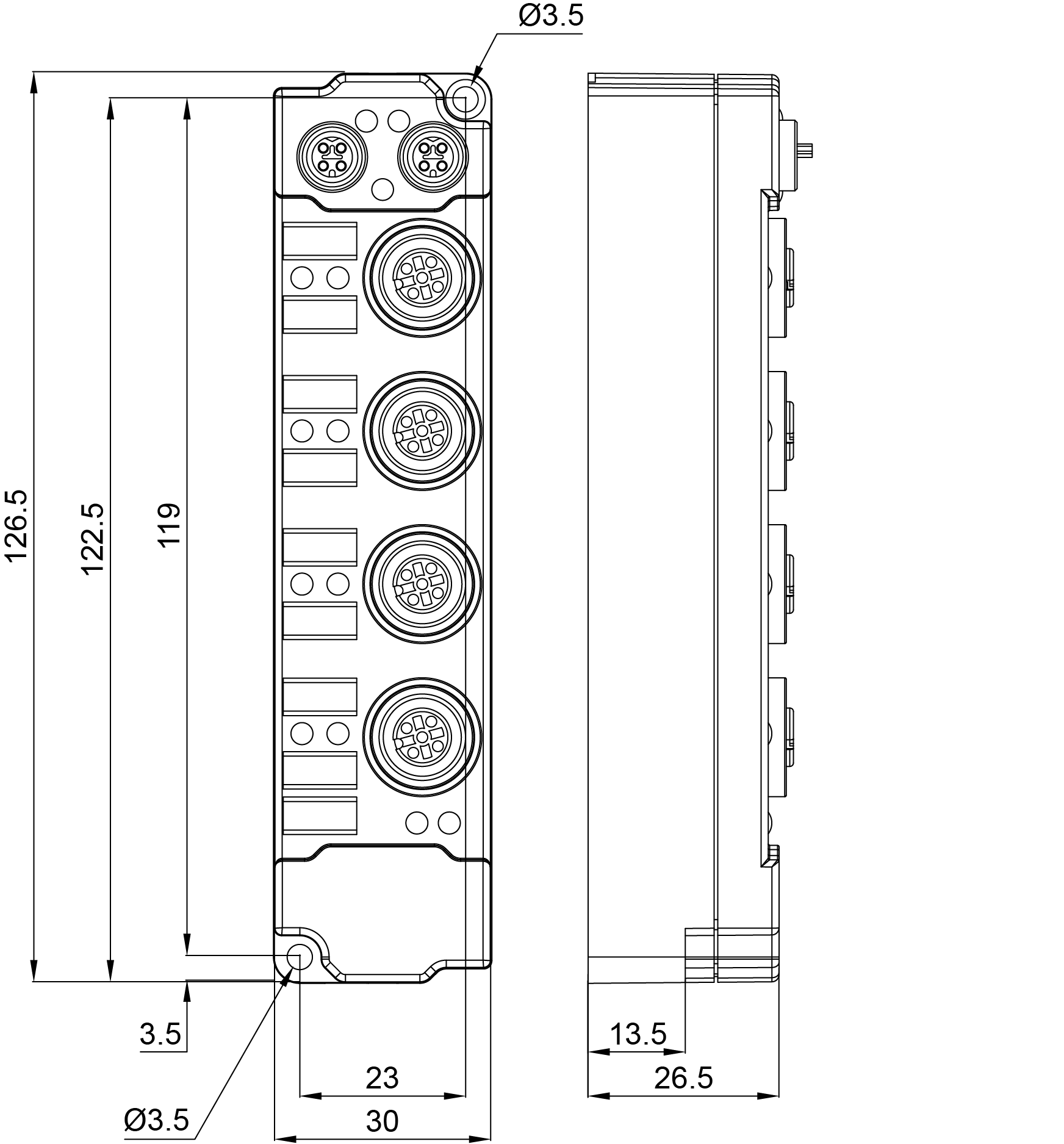
| Dimensions (W x H x D) | 30 mm x 126 mm x 26.5 mm |
| Material | PA6 (polyamide) |
| Installation | 2 fixing holes 3.5 mm diameter for M3 |
Loading content ...
| Material compliance | EPP7041-1002 |
|---|---|
| CAS No. | 7439-92-1, 115-86-6 |
| REACH SVHC | Lead, Triphenyl phosphate |
| REACH Annex XVII | compliant |
| REACH Annex XIV | compliant |
| SCIP No. | SCIP submission in progress |
| POP | compliant |
| RoHS | compliant with exemption |
| RoHS exemption | 6c: Copper alloy with a mass fraction of up to 4% lead, 7c-I: Lead-containing electrical and electronic components in glass and ceramic materials, excluding dielectric ceramics in capacitors |
| China-RoHS | www.beckhoff.com/china-rohs-io |
| CA Prop65 | www.beckhoff.com/prop65 |
| Disclaimer | This statement and the information contained above are, to the best of our knowledge and belief, accurate, based on the information we have received from our suppliers. This information is in line with the current standard of technology and our suppliers’ technical documentation. The absence of the substances is not verified by Beckhoff Automation by means of analytical tests. When addressed to our customers any information contained in this document is subject to the terms and conditions expressed in the governing customer agreement. Our general terms and conditions apply. |
Loading content ...
Loading content ...
Loading content ...
Loading content ...
© Beckhoff Automation 2026 - Terms of Use