
Mit PC-based Control, EtherCAT und unseren intelligenten Transportsystemen wie dem Planarmotorantriebssystem XPlanar, dem linearer Transportsystem XTS oder dem modularen Industrieroboter-Baukasten ATRO bieten wir Ihnen eine flexible und performante Automatisierungsplattform. Nicht nur für Anwendungen, bei denen es auf Geschwindigkeit und Präzision ankommt, eignet sich unsere leistungsfähige Steuerungstechnik perfekt für ihre Montage- und Handhabungsprozesse – auch „langsame“ Abläufe profitieren im Sinn von Produktivität von Beckhoff Automatisierungslösungen. Dies gilt für alle Bereiche, z. B. dem Transport, Fügen, Schweißen und Kleben bis zum Montieren und Prüfen; von Losgröße 1 bis zur Massenproduktion, von einfachen bis komplexen Applikationen.
Ihr Vorsprung in der Montage- und Handhabungstechnik:
- Wettbewerbsvorteile durch innovative Technologien
- durchgängige Komplettlösung für ebenso schnelle wie präzise Applikationen, für einfache und komplexe Applikationen
- Flexibilität im Maschinendesign durch intelligente Produkttransportsysteme
- kompetente Beratung dank tiefgehendem Branchen-Know-how
Sie haben Fragen?
Unsere Technologien für die Montage- und Handhabungstechnik

Alle Steuerungsfunktionen auf einer Plattform: PC-based Control
Mit PC-based Control bietet Beckhoff eine offene und alle Bereiche der Montage und Handhabung umfassende Systemlösungen: Modular im Aufbau und skalierbar hinsichtlich Leistung, Bauform und Preis steht eine variable Hardware für alle Maschinenfunktionen zur Verfügung: von Prozesssteuerung, HMI, Motion Control, Robotik, Safety, Messtechnik bis hin zu Vision und IoT-Anbindung. Rückgrat des Systems bilden skalierbare Industrie-PCs, gepaart mit der modularen und echtzeitfähigen Softwareplattform TwinCAT sowie EtherCAT als leistungsfähigem Kommunikationssystem. Mit PC-based Control steht Ihnen eine zukunftsfähige Lösung zur Verfügung:
Ihr Vorsprung in der Montage und Handhabungstechnik:
- offen in Soft- und Hardware für die Integration Ihres Know-hows bis zur Cloud-Anbindung
- flexibel auch anspruchsvolle Montage- und Bewegungsabläufe automatisieren und präzise synchronisieren
- maßgeschneiderte Lösungen hinsichtlich Leistung, Bauform und Preis passend zu Ihren Anforderungen

Flexibel, modular und performant: die DNA von TwinCAT 3
Die Automatisierungssoftware TwinCAT 3 integriert sämtliche Engineering- und Runtime-Prozesse zur Realisierung aller Steuerungsaufgaben mit TwinCAT Motion Control 3 (MC3) als wichtigem Bestandteil. Diese nächste Generation Motion Control erweitert die Merkmale von TwinCAT NC2 um zahlreiche Features wie die Multicore- und Multitaskingfähigkeit. Flexibel nach den Standards der IEC 61131-3, in C++ oder mit MATLAB® und Simulink® programmierbar, hebt TwinCAT Ihre Möglichkeiten in der Realisierung komplexer Montage- und Handhabungsprozesse auf das nächste Level.
TwinCAT-Highlights für die Montage- und Handhabungstechnik:
- Integration aller Funktionen, von HMI über Motion Control, XTS und XPlanar, Robotik, Safety, Messtechnik bis hin zu Vision, Cloud-Anbindung und Machine Learning
- umfangreiche Bibliotheken für Motion Control sowie verschiedene Roboterkinematiken
- skalierbare Motion-Control-Plattform ohne feste Limitierung der Achsanzahl
- präzise synchronisierte Bewegungen beliebiger Achsen und Achsverbünde über alle CPU-Cores (Multicore)

Kompromisslos schnell, flexibel und offen: EtherCAT
Die EtherCAT-Technologie wurde durch Beckhoff im Jahr 2003 auf den Markt gebracht und als offener Standard der Automatisierungstechnik zur Verfügung gestellt. Mit herausragender Leistung, flexibler Topologiewahl, umfangreicher Diagnose und einfacher Konfiguration eignet sich EtherCAT optimal auch für den Einsatz in der Montage und Handhabung. Setzen Sie auf die mit Abstand schnellste und performanteste Industrial-Ethernet-Technologie – EtherCAT.
EtherCAT-Highlights für die Montage und Handhabung:
- extrem kurze Zykluszeiten für präzise und effiziente Prozesse
- große Auswahl EtherCAT-kompatibler Sensoren und Aktoren im Markt
- flexible Anbindung anderer Feldbussysteme wie CANopen und PROFINET
- reduzierter Verkabelungsaufwand durch Einkabellösung EtherCAT P
- maximale Leistung mit Geschwindigkeiten von 1 GBit/s bzw. 10 GBit/s durch EtherCAT G bzw. EtherCAT 10G

Antriebssysteme für dynamische und präzise Positionieraufgaben
Mit unserer einzigartigen Technologievielfalt in der elektrischen Antriebstechnik verschaffen wir Ihnen einen technologischen Vorsprung gegenüber Wettbewerbern: Ob Multiachs-Servosysteme mit Synchron Servomotoren, hochdynamische Linear Servomotoren, kompakte Elektrozylinder, Tubularmotoren, kompakte Antriebe für den Niederspannungsbereich oder Antriebslösungen für schaltschranklose Maschinenkonzepte – alles ist systemintegriert und zu leistungsfähigen Montageprozessen kombinierbar.
Die Vorteile hoch skalierbarer Antriebstechnik auf einen Blick:
- Viele Antriebstechnologien, ein System: unterschiedlichste Antriebs- und Handhabungstechnologien beliebig kombinieren und präzise synchronisieren
- Montageprozesse neu denken: Intelligente Transportsysteme ermöglichen überlegene Maschinenkonzepte.
- One Cable Technology: Power- und Feedbacksystem in einer Standardmotorleitung spart Bauraum und Installationszeit
- Safety inklusive: Sichere Automatisierungstechnologie TwinSAFE für alle Beckhoff Antriebslösungen verfügbar
- Kompakte Antriebstechnik: Motion Control für den Niederspannungsbereich
Unsere Produkt-Highlights für die Montage- und Handhabungstechnik

Eliminiert den Schaltschrank: das MX-System
Das MX-System ermöglicht vollständig schaltschranklose Automatisierungslösungen. Der Baukasten aus unterschiedlichen Baseplates und Funktionsmodulen (IPC-, Koppler-, I/O-, Drive-, Relais- und Systemmodule) vereint alle Aufgaben und Eigenschaften eines Schaltschranks: Energieeinspeisung, -absicherung und -verteilung, Erzeugung und Überwachung von Hilfsspannungen, Ablaufsteuerung mit den Ein- und Ausgängen, Ansteuerung von Motoren und Aktuatoren sowie die Anschlussebene für die Feldgeräte. Die nach internationalen Standards zertifizierten Baugruppen verringern die Aufwände bei Planung, Zusammenbau, Maschineninstallation sowie Instandhaltung.
Die Vorteile des MX-Systems auf einen Blick:
- mehr Stellfläche in der Produktion durch Wegfall der Schaltschränke
- IP67-Gehäuse erlaubt den Einsatz in allen Bereichen
- Effizienzsteigerung bei der Maschinenherstellung durch reduzierten Engineering-, Montage- und Testaufwand
- kombinierbar mit EtherCAT-Box-Modulen und dezentralem Servoantriebssystem AMP8000
- integrierte Safety-Funktionalitäten für Antriebe und I/Os über FSoE (Failsafe over EtherCAT)
- signifikant reduzierte Aufwände und Zeiten bei Planung und Montage

Robotik neu gedacht: Automation Technology for Robotics
Automation Technology for Robotics (ATRO) ist ein modularer Industrieroboter-Baukasten, mit dem individuell und flexibel verschiedenste Roboterkinematiken zusammengestellt werden können – vom einfachen Rundtakttisch bis zur Mehr-Arm-Kinematik. Auf einem Basismodul für die Kabel- und Medienzuführung werden standardisierte Motormodule verschiedener Baugrößen zusammen mit Linkmodulen in unterschiedlichen Ausführungen kombiniert. Durch die vollständige Integration in die Steuerungsplattform TwinCAT 3 steht das breite Spektrum bewährter Automatisierungsfunktionen zur Verfügung. Die präzise Synchronisation der Roboter mit XPlanar, XTS und allen anderen Bewegungsabläufen ermöglicht Ihnen völlig neue Maschinenkonzepte.
Die Vorteile von ATRO auf einen Blick:
- modulares Baukastensystem ermöglicht individuelle und flexibel erweiterbare Kinematiken
- vollständige Integration in die Steuerungsplattform TwinCAT 3 baut Technologiehürden ab
- kürzere Taktzeiten durch endlos drehende Achsen und exakte Synchronisation aller Prozessschritte einer Maschine
- standardisierte Schnittstellen für Daten, Energie und Fluide reduzieren Rüst-, Wartungs- und Stillstandszeiten

Skalierbar und performant in Hard- und Software: Beckhoff Vision
Mit einem umfassenden Spektrum an Bildverarbeitungskomponenten erweitert Beckhoff Vision das Einsatzspektrum industrieller Bildverarbeitung in der Montage- und Handhabungstechnik: Leistungsfähige Kameras, präzise Optiken und variable Beleuchtungen sowie Kompletteinheiten (Units) ergeben zusammen mit der Bildverarbeitungssoftware TwinCAT Vision ein leistungsfähiges Bildverarbeitungssystem. Systemintegriert in PC-based Control und über EtherCAT P in bestehende Steuerungsumgebungen integrierbar, wird die historisch strikte Trennung zwischen Vision und Automatisierungstechnik aufgehoben. Daraus resultieren für Maschinenbauer zahlreiche Vorteile, z. B. bei der Synchronisation von Kamera mit dem Montageprozess.
Die Vorteile einer systemintegrierten Bildverarbeitung auf einen Blick:
- Kamera, Optik, Beleuchtung, Zubehör und Software von einem Anbieter
- vollständiges Vision System zum direkten Einstieg
- einzigartige Vorteile durch EtherCAT P für Kommunikation und Spannungsversorgung
- offene Vision Lösung für nahtlose Systemintegration

Mehr Flexibilität auf weniger Raum: XPlanar
Das intelligente Transportsystem XPlanar hebt Montagelinien auf ein neues Level hinsichtlich Flexibilität, Performance und Platzbedarf. Der Schwebeeffekt des Planarmotorantriebssystems XPlanar sorgt für verschleißfreie und dynamische Bewegungen der Mover über ein flexibel konfigurierbares Streckenlayout. Bei richtiger Kombination von Kachel- und Movergröße sind Platzeinsparungen von bis zu 50% möglich.
Die Vorteile von XPlanar auf einen Blick:
- präzise Positionierung und flexibles Verfahren der Mover auf der gesamten Anlage
- anwendungspezifische Anordnung der Kacheln in beliebiger Geometrie
- individueller 2D-Transport mit bis zu 2 m/s
- Bewegung mit bis zu 6 Freiheitsgraden, inklusive 360°-Rotation
- Mover und Kacheln in unterschiedlichen Formaten ermöglichen effiziente Flächennutzung durch 2-Wege-Betrieb
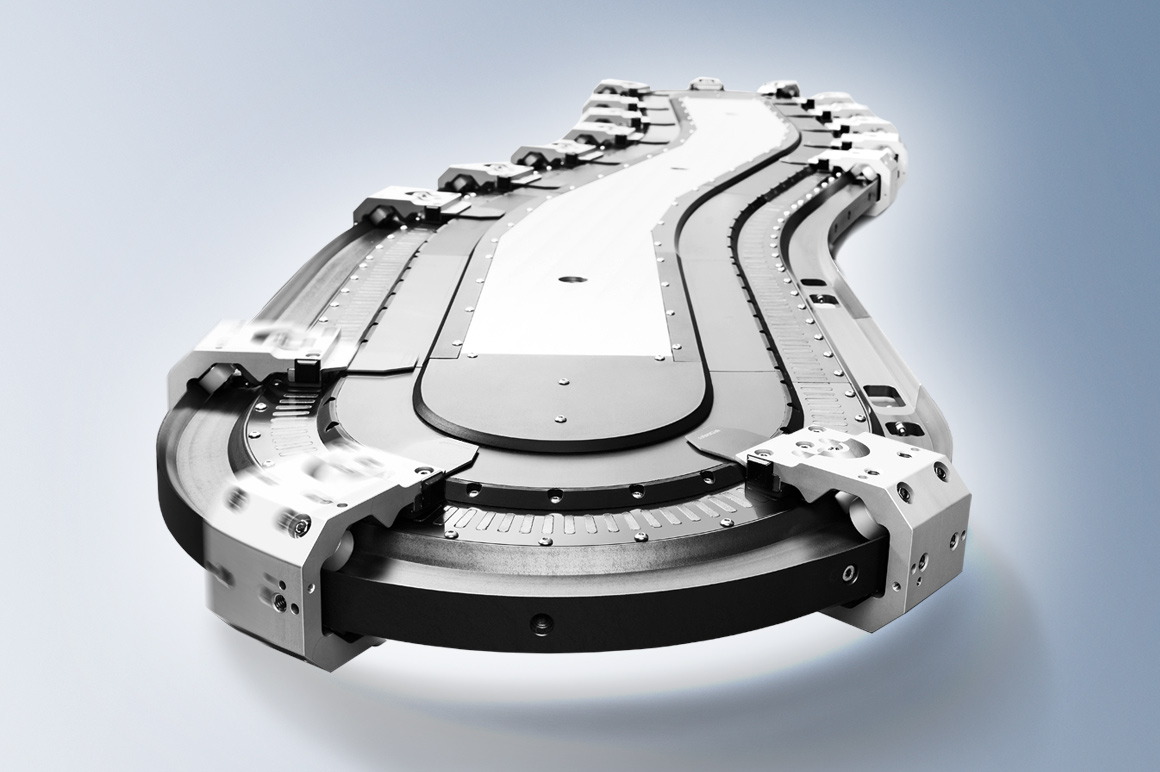
Intelligenter Produkttransport optimiert Montagelinien: XTS
Das eXtended Transportsystem XTS eröffnet Ihnen vielfältige Möglichkeiten, den Footprint ihrer Maschinen zu reduzieren und den gesamten Montageprozess zu optimieren: Auf Basis von Motormodulen mit verschiedenen Geometrien können Sie individuelle Transportstrecken realisieren. Da jeder Mover individuell angesteuert wird, können mithilfe flexibel konfigurierbarer Bewegungsprofile auch hoch komplexe Abläufe realisiert werden. Zusätzliche Freiheitsgrade schafft die Kombination mit der No Cable Technology (NCT) für die berührungslose Übertragung der Spannungsversorgung und synchronen Echtzeit-Datenübertragung auf die XTS-Mover. Mit NCT wird jeder Mover zu einer fahrbaren Montagestation.
Die Vorteile von XTS auf einen Blick:
- flexibles lineares Transportsystem ermöglicht unterschiedliche Streckenführungen
- schnelle Formatwechsel durch softwarebasierte Anpassungen bis hin zu Losgröße 1
- flexible Bewegungsprofile kompensieren unterschiedliche Prozesszeiten der Montagestationen
- XTS-System wird mit NCT aktiver Teil des Montageprozesses
- Bearbeitungsschritte und Qualitätskontrollen auf dem fahrenden Mover steigern die Anlageneffizienz und reduzieren den Maschinenfootprint
