Kompakte Antriebstechnik: Motorbaureihe AM81xx und AM31xx
Die Beckhoff Antriebstechnik stellt, in Kombination mit den Motion-Control-Lösungen der Automatisierungssoftware TwinCAT, ein vollständiges und modernes Antriebssystem dar. Für ein- und mehrachsige Positionieraufgaben mit hochdynamischen Anforderungen ist die PC-basierte Steuerungstechnik von Beckhoff bestens gerüstet
Weitere Informationen zu diesem Video

EtherCAT Box
EtherCAT-High-Performance direkt im Feld: Mit den EtherCAT-Box-Modulen bietet Beckhoff ein I/O-System in IP67.

EtherCAT-Klemmen
Das EtherCAT-Klemmensystem stellt ein umfassendes Produktspektrum für alle Signale der Automatisierungswelt bereit.

I/O
Realisieren Sie mit unseren I/O-Komponenten Ihre Anwendungen mit EtherCAT und anderen gängigen Feldbussystemen.
Motion
Unsere innovative Antriebstechnik eröffnet Ihnen nahezu unbegrenzte Möglichkeiten bei der Umsetzung Ihrer Applikation.
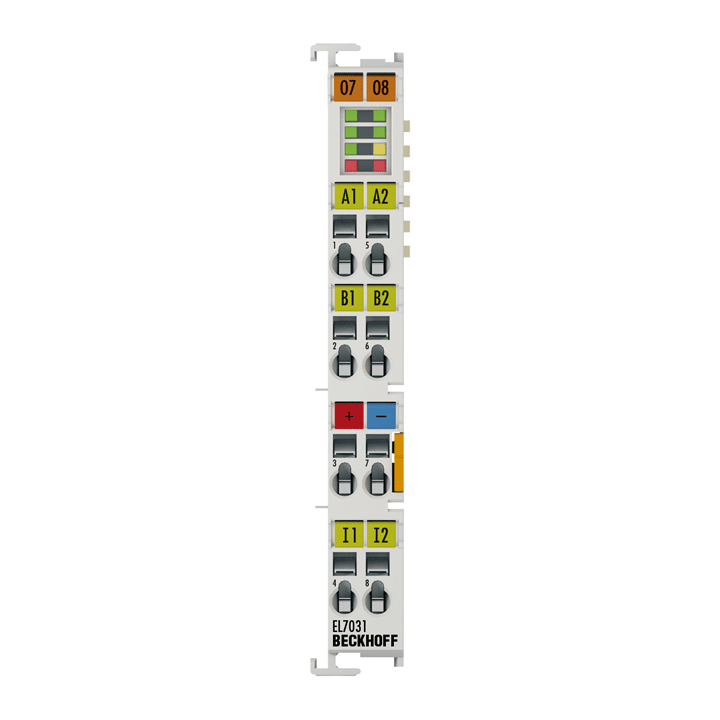
EL7031 | EtherCAT-Klemme, 1-Kanal-Motion-Interface, Schrittmotor, 24 V DC, 1,5 A
Die EtherCAT-Klemme EL7031 ist für den direkten Anschluss von Schrittmotoren im kleinen Leistungsbereich bis 1,5 A vorgesehen. Die Schrittmotorendstufe ist in kompakter Bauform, zusammen mit zwei digitalen Eingängen für Endlagenschalter, in der EtherCAT-Klemme untergebracht. Durch Parametrierung kann die EL7031 an den zu betreibenden Motor und die Applikationserfordernisse angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt.
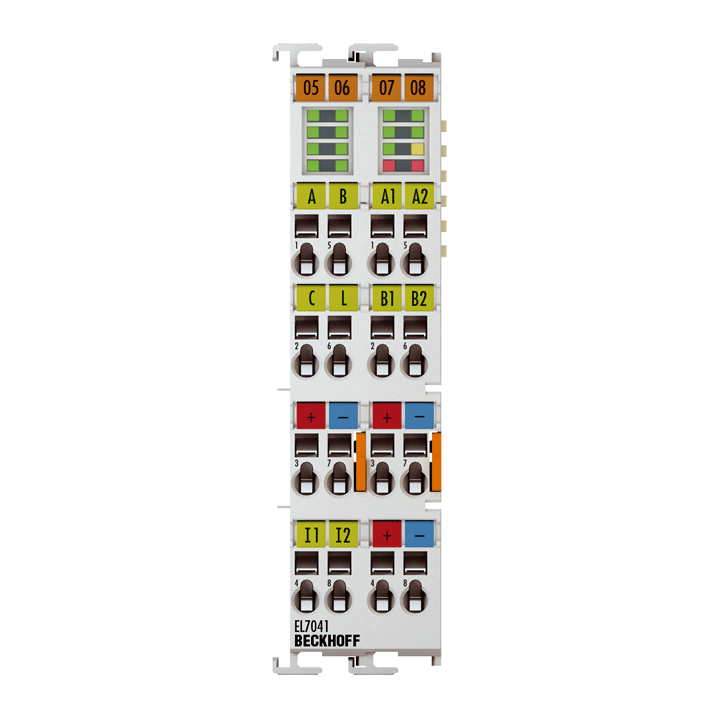
EL7041 | EtherCAT-Klemme, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 5 A, mit Inkremental-Encoder
Die EtherCAT-Klemme EL7041 ist für den direkten Anschluss von Schrittmotoren im mittleren Leistungsbereich bis 5 A und für einen Spannungsbereich von 8…48 V vorgesehen. Die Schrittmotorendstufe ist in kompakter Bauform, zusammen mit zwei digitalen Eingängen für Endlagenschalter und einem Encoderinterface, in der EtherCAT-Klemme untergebracht. Durch Parametrierung kann die EL7041 an den zu betreibenden Motor und die Applikationserfordernisse angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt.
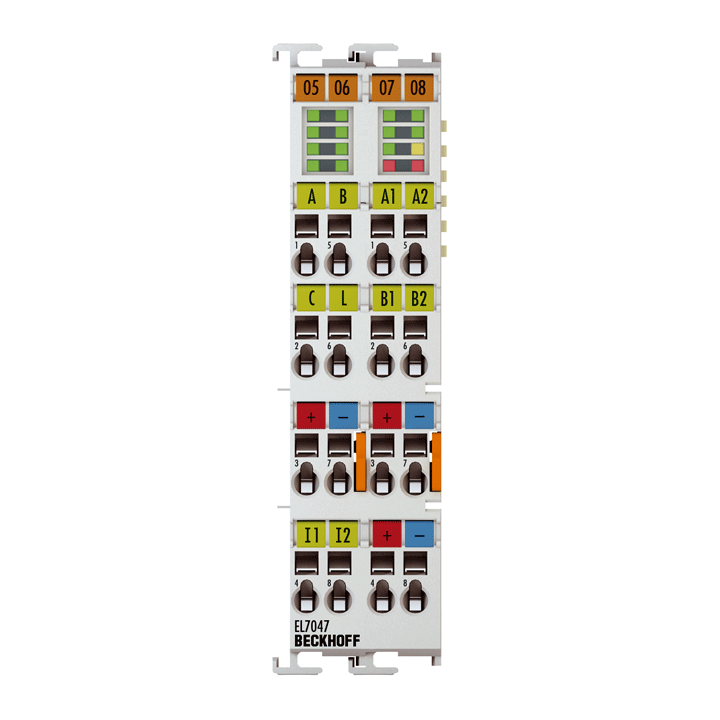
EL7047 | EtherCAT-Klemme, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 5 A, feldorientierte Regelung, mit Inkremental-Encoder
Die EtherCAT-Klemme EL7047 ist für den direkten Anschluss von Schrittmotoren im mittleren Leistungsbereich bis 5 A und für einen Spannungsbereich von 8…48 V vorgesehen. Die Schrittmotorendstufe ist in kompakter Bauform, zusammen mit zwei digitalen Eingängen für Endlagenschalter und einem Encoderinterface, in der EtherCAT-Klemme untergebracht. Durch Parametrierung kann die EL7047 an den zu betreibenden Motor und die Applikationserfordernisse angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt.

EP7041-0002 | EtherCAT Box, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 5 A, M12, mit Inkremental-Encoder
Die EtherCAT Box EP7041 ist für den direkten Anschluss unterschiedlicher Schrittmotoren vorgesehen. Die PWM-Endstufen für zwei Motorspulen sind bei geringster Bauform, zusammen mit zwei Eingängen für Endlagenschalter, in der Baugruppe untergebracht und decken einen großen Spannungs- und Strombereich ab. Mit einigen Parametern kann die EP7041 an den Motor und die Anwendung angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt. Durch den Anschluss eines Inkremental-Encoders ist die Realisierung einer einfachen Servoachse möglich. Zwei digitale Eingänge und ein digitaler 0,5-A-Ausgang erlauben die Verbindung von Endschaltern und Motorbremse.

EP7041-1002 | EtherCAT Box, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 1,5 A, M12, mit Inkremental-Encoder
Die EtherCAT Box EP7041-1002 ist für den direkten Anschluss unterschiedlicher Schrittmotoren vorgesehen. Die PWM-Endstufen für zwei Motorspulen sind bei geringster Bauform, zusammen mit zwei Eingängen für Endlagenschalter, in der Baugruppe untergebracht und decken einen großen Spannungs- und Strombereich ab. Mit einigen Parametern kann die EP7041-1002 an den Motor und die Anwendung angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt. Durch den Anschluss eines Inkremental-Encoders ist die Realisierung einer einfachen Servoachse möglich. Zwei digitale Eingänge und ein digitaler 0,5-A-Ausgang erlauben die Verbindung von Endschaltern und Motorbremse.
KL2531 | Busklemme, 1-Kanal-Motion-Interface, Schrittmotor, 24 V DC, 1,5 A
Die Busklemme KL2531 ist für den direkten Anschluss unterschiedlicher kleiner Schrittmotoren vorgesehen. Die PWM-Endstufen für zwei Motorspulen sind bei geringster Bauform, zusammen mit zwei Eingängen für Endlagenschalter, in der Busklemme untergebracht. Mit einigen Parametern kann die KL2531 an den Motor und die Anwendung angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt. Die integrierte Stillstandsüberwachung spart in vielen Anwendungen das Gebersystem oder den Endlagenschalter ein.
KL2541 | Busklemme, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 5 A, mit Inkremental-Encoder
Die Busklemme KL2541 ist für den mittleren Leistungsbereich von Schrittmotoren vorgesehen. Die PWM-Endstufen decken einen großen Spannungs- und Strombereich ab. Sie sind, zusammen mit zwei Eingängen für Endlagenschalter, in der Busklemme untergebracht. Mit einigen Parametern kann die Schrittmotorklemme KL2541 an den Motor und die Anwendung angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt. Zusammen mit einem Schrittmotor stellt die KL2541 eine preiswerte Kleinservoachse dar.
EL7332 | EtherCAT-Klemme, 2-Kanal-Motion-Interface, DC-Motor, 24 V DC, 1 A
Die EtherCAT-Klemme EL7332 ermöglicht den direkten Betrieb von zwei DC-Motoren und ist zum E-Bus galvanisch getrennt. Die Drehzahl wird durch einen 16-Bit-Wert vom Automatisierungsgerät vorgegeben. Die Ausgangsstufe ist überlast- und kurzschlusssicher, die thermische Überlastwarnung wird für beide Kanäle gemeinsam angegeben. Die EtherCAT-Klemme enthält zwei Kanäle, deren Signalzustand durch Leuchtdioden angezeigt wird. Die LEDs ermöglichen eine schnelle Vor-Ort-Diagnose.
EL7342 | EtherCAT-Klemme, 2-Kanal-Motion-Interface, DC-Motor, 48 V DC, 3,5 A
Die EtherCAT-Klemme EL7342 ermöglicht den direkten Betrieb von zwei DC-Motoren und ist zum E-Bus galvanisch getrennt. Drehzahl und Position werden durch einen 16-Bit-Wert vom Automatisierungsgerät vorgegeben. Durch den Anschluss eines Inkremental-Encoders ist die Realisierung einer einfachen Servoachse möglich. Die Ausgangsstufe ist überlast- und kurzschlusssicher, die thermische Überlastwarnung wird für beide Kanäle gemeinsam angegeben. Die EtherCAT-Klemme enthält zwei Kanäle, deren Signalzustand durch Leuchtdioden angezeigt wird. Die LEDs ermöglichen eine schnelle Vor-Ort-Diagnose.
KL2284 | Busklemme, 4-Kanal-Digital-Ausgang, Wendeschaltung, 24 V DC, 2 A
Die Ausgangsklemme KL2284 schaltet Lasten in wählbarer Polarität. DC-Motoren können damit in beiden Drehrichtungen genutzt werden. Mit zwei Ausgangsbits je Kanal wird jeweils eine Polarität eingeschaltet. Eine Verriegelung verhindert das gleichzeitige Einschalten beider Richtungen. Durch moderne Leistungshalbleiter ist ein sicheres und verschleißfreies Schalten bei geringsten Abmessungen möglich. Die hohen Einschalt- und Kurzschlussströme der KL2284 sind vergleichbar mit einem robusten Relais; die Anzahl der Schaltspiele ist nahezu unbegrenzt.
KL2532 | Busklemme, 2-Kanal-Motion-Interface, DC-Motor, 24 V DC, 1 A
Die Busklemme KL2532 ermöglicht den direkten Betrieb von zwei DC-Motoren und ist zum K-Bus galvanisch getrennt. Die Drehzahl wird durch einen 16-Bit-Wert vom Automatisierungsgerät vorgegeben. Die Ausgangsstufe ist überlast- und kurzschlusssicher. Die Busklemme enthält zwei Kanäle, deren Signalzustand durch Leuchtdioden angezeigt wird. Die LEDs ermöglichen eine schnelle Vor-Ort-Diagnose.
KL2552 | Busklemme, 2-Kanal-Motion-Interface, DC-Motor, 48 V DC, 5 A
Die Busklemme KL2552 ermöglicht den direkten Betrieb von zwei DC-Motoren und ist zum K-Bus galvanisch getrennt. Die Drehzahl wird durch einen 16-Bit-Wert vom Automatisierungsgerät vorgegeben. Durch den Anschluss eines Inkremental-Encoders ist die Realisierung einer einfachen Servoachse möglich. Typische Motorparameter können eingestellt werden und vermeiden kritische Zustände für den DC-Motor. Die Last kann durch Maximalwertbegrenzung von Drehzahl, Drehmoment und Beschleunigung geschützt werden. Die Ausgangsstufe ist überlast- und kurzschlusssicher. Die Busklemme enthält zwei Kanäle, deren Signalzustand durch Leuchtdioden angezeigt wird. Die LEDs ermöglichen eine schnelle Vor-Ort-Diagnose.
KL2791 | Busklemme, 1-Kanal-Motion-Interface, AC-Motor, 230 V AC, 0,9 A
Der AC-Motor-Drehzahlsteller KL2791-xxxx ist für den direkten Anschluss unterschiedlicher Einphasenwechselstrom-Motoren kleiner Leistung vorgesehen. Typische Motoren, wie Kondensatormotor, Universalmotor und Spaltpolmotor, können durch die Ansteuerung mit der KL2791-xxxx in ihrer Drehzahl reduziert werden. Über die Prozessdaten wird die gewünschte Ausgangsleistung vorgegeben. Die Leistungsstellung wird passend zum jeweiligen Ausgabewert durch gezieltes Ein- und Ausschalten zu optimierten Zeitpunkten durchgeführt. Besonders geeignet ist dieses Verfahren für Antriebe mit einer quadratischen Lastkennlinie wie Lüfter und Pumpen.
KL2284 | Busklemme, 4-Kanal-Digital-Ausgang, Wendeschaltung, 24 V DC, 2 A
Die Ausgangsklemme KL2284 schaltet Lasten in wählbarer Polarität. DC-Motoren können damit in beiden Drehrichtungen genutzt werden. Mit zwei Ausgangsbits je Kanal wird jeweils eine Polarität eingeschaltet. Eine Verriegelung verhindert das gleichzeitige Einschalten beider Richtungen. Durch moderne Leistungshalbleiter ist ein sicheres und verschleißfreies Schalten bei geringsten Abmessungen möglich. Die hohen Einschalt- und Kurzschlussströme der KL2284 sind vergleichbar mit einem robusten Relais; die Anzahl der Schaltspiele ist nahezu unbegrenzt.

TwinCAT
Das TwinCAT-Softwaresystem verwandelt nahezu jedes PC-basierte System in eine Echtzeitsteuerung mit mehreren SPS-, NC-, CNC- und/oder Robotik-Laufzeitsystemen.

EP7041-2002 | EtherCAT Box, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 5 A, M12, mit Inkremental-Encoder
Die EtherCAT Box EP7041-2002 ist für den direkten Anschluss unterschiedlicher Schrittmotoren vorgesehen. Die PWM-Endstufen für zwei Motorspulen sind bei geringster Bauform, zusammen mit zwei Eingängen für Endlagenschalter, in der Baugruppe untergebracht und decken einen großen Spannungs- und Strombereich ab. Mit einigen Parametern kann die EP7041-2002 an den Motor und die Anwendung angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 64-fach-Microstepping sichergestellt. Durch den Anschluss eines Inkremental-Encoders ist die Realisierung einer einfachen Servoachse möglich. Zwei digitale Eingänge und ein digitaler 0,5-A-Ausgang erlauben die Verbindung von Endschaltern und Motorbremse. Die externe Motoreinspeisung erfolgt über einen integrierten Stecker.

EP7041-3002 | EtherCAT Box, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 5 A, für Highspeed-Anwendungen, M12, mit Inkremental-Encoder
Die EtherCAT Box EP7041-3002 ist für den direkten Anschluss unterschiedlicher Schrittmotoren vorgesehen. Die PWM-Endstufen für zwei Motorspulen decken einen großen Spannungs- und Strombereich ab. Mit einigen Parametern kann die EP7041-3002 an den Motor und die Anwendung angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 256-fach-Microstepping sichergestellt. Durch den Anschluss eines Inkremental-Encoders ist die Realisierung einer einfachen Servoachse möglich. Zwei digitale Eingänge und ein digitaler 0,5-A-Ausgang erlauben die Verbindung von Endschaltern und Motorbremse. Die hard- und softwaremäßige Auslegung machen das Schrittmotormodul insbesondere für Anwendungen geeignet, bei denen es, auf Grund von Eigenresonanzen des Motors und der bewegten Masse, zu einem unruhigen Motorlauf kommen kann.

EP7041-3102 | EtherCAT Box, 1-Kanal-Motion-Interface, Schrittmotor, 48 V DC, 5 A, für Highspeed-Anwendungen, M12, mit Inkremental-Encoder
Die EtherCAT Box EP7041-3102 ist für den direkten Anschluss unterschiedlicher Schrittmotoren vorgesehen. Die PWM-Endstufen für zwei Motorspulen decken einen großen Spannungs- und Strombereich ab. Mit einigen Parametern kann die EP7041-3102 an den Motor und die Anwendung angepasst werden. Ein besonders ruhiger und präziser Motorlauf ist durch ein 256-fach-Microstepping sichergestellt. Durch den Anschluss eines Inkremental-Encoders ist die Realisierung einer einfachen Servoachse möglich. Zwei digitale Eingänge und ein digitaler 0,5-A-Ausgang erlauben die Verbindung von Endschaltern und Motorbremse.

EP7211-0034 | EtherCAT Box, 1-Kanal-Motion-Interface, Servomotor, 48 V DC, 4,5 A, OCT, geeignet für STO-Anwendungen
Die Servomotor-EtherCAT-Box EP7211-0034 mit integrierter One Cable Technology (OCT) bietet hohe Servo-Performance in sehr kompakter Bauform für Motoren der Baureihe AM8100, bis 4,5 A (Ieff). Die One Cable Technology vereint Motorleitung und absolutes Feedbacksystem in einer einzigen Leitung. Das integrierte elektronische Typenschild der AM81xx-Motoren kann von der Servo-Box automatisch eingelesen werden und konfiguriert die Motorparameter automatisch. Dadurch vereinfacht sich der Aufwand für Verdrahtung und Inbetriebnahme.