Beckhoff Produkte mit XFC-Technologie erfüllen die Anforderungen von Applikationen, die schnelle Ansteuerung, kurze Reaktionszeiten und deterministische Kontrolle im Mikrosekundenbereich erfordern. Zu den relevanten Technologien gehören EtherCAT als Feldbuskommunikation, leistungsstarke Industrie-PCs, I/O-Produkte wie IP20-Klemmen und IP67-Box-Module sowie die flexible Automatisierungssoftware TwinCAT.
Die XFC-Technologie bietet signifikante Vorteile durch feinere Zeitauflösungen für präzisionskritische Prozesse. Dank der optimierten Steuerungsarchitektur und der Integration verschiedener Teiltechnologien können Reaktionszeiten von deutlich unter 100 Mikrosekunden erreicht werden. Dies ermöglicht die Umsetzung hochdynamischer und zeitdiskreter Prozesse mit hoher Präzision und Zuverlässigkeit bereits mit Standardkomponenten.
Die XFC-Technologie umfasst folgende Teiltechnologien aus verschiedenen Produktbereichen: Distributed Clocks, Timestamp/Multi-Timestamp, Oversampling, schnelle Ein-/Ausgänge im Sub-Mikrosekundenbereich und Mikroinkremente. Diese Teiltechnologien tragen entscheidend dazu bei, die hohe Leistung und Genauigkeit der XFC-Systeme zu gewährleisten.
XFC-Technologien im Detail

Distributed Clocks
Distributed Clocks schaffen eine einheitliche Zeitbasis in allen Busteilnehmern, die für zeitkritische Prozesse unerlässlich ist und eine präzise Abstimmung von Ereignissen über verschiedene Komponenten hinweg ermöglicht. Damit lösen sich die Steuerungsaktionen vom Steuerungs-/Buszyklus und werden frei auf der Zeitachse verschiebbar. Mit Distributed Clocks wird die Leistung und Zuverlässigkeit industrieller Anwendungen durch die zeitlich deterministische Erfassung und Ausgabe von Signalen optimiert. Distributed Clocks bietet mit der einheitlichen Zeitbasis die Grundlage für alle weiteren XFC-Technologien.
- dezentrale, absolute Systemsynchronisation für beliebig viele CPUs, I/Os und Antriebsgeräte
- interne Zeitauflösung: 10 ns
- Genauigkeit Distributed Clocks: << 1 µs
- synchronisierbar zu anderen Zeitsystemen (externe Synchronisation)

Timestamp
Timestamp/Multi-Timestamp bietet die Möglichkeit, die einheitliche Distributed Clocks-Systemzeit als Datentyp zu verarbeiten. Diese Technologie ermöglicht eine präzise Erfassung von Zeitstempeln für Ereignisse in Echtzeit. Mit Timestamp können digitale und analoge Ereignisse buszyklusunabhängig erfasst und Ausgänge buszyklusunabhängig gesetzt werden. So können z. B. mehrere Antriebsachsen präzise zueinander und zu der Systemzeit synchronisiert werden. Im Unterschied zu Timestamp können bei Multi-Timestamp mehrere Schaltergebnisse pro PLC-Zyklus verarbeitet werden.
- Timestamp
- extrem präzise Zeitmessung für digitale Einzel-Ereignisse je Zyklus: Auflösung 1 ns, interne Abtastung im ns-Bereich
- absolute Distributed-Clocks-Zeit mit 64-Bit-Auflösung, einfaches Zeithandling > 580 Jahre
- Multi-Timestamp
- präzise Zeitmessung von bis zu 32 Ereignissen je Zyklus: Auflösung 1 ns, interne Abtastung im µs-Bereich
- Distributed-Clocks-Zeit mit 32-Bit-Auflösung, ausreichend für Aktionen in einem Zeitbereich von ±4 Sekunden

Oversampling
Mit Oversampling können geräteseitig höhere Abtastraten umgesetzt werden, ohne den SPS-Zyklus zu verändern. Dabei wird zeit-äquidistant mehrfach pro Buszyklus abgetastet und einmal ein Paket an Messwerten übertragen. Mit den hohen Abtastfrequenzen können Signale zeitlich höher aufgelöst aufgenommen und hochfrequentere Signale erfasst werden als in der Standardauswertung (1 Messwert je Bus-/Steuerungszyklus). Der sonst übliche Weg für die Erfassung solcher Signale wäre das Verringern der Zykluszeit, was aber praktischen Grenzen seitens der Steuerung unterliegt. Bei Oversampling-Ausgängen können im Vergleich zum Zyklus höhere Steuerungsfrequenzen umgesetzt werden, sodass je Bus-/Steuerungszyklus mehrere Stellbefehle ausgegeben werden können.
- Unterstützung für analoge I/O-EtherCAT-Klemmen (Stand 2024): Signalkonvertierung bis 100 kSps/10 µs
- Unterstützung für digitale I/O-EtherCAT-Klemmen (Stand 2024): bis 10 MSps/100 ns
- Unterstützung für Winkel-/Wegmessung (Stand 2024): bis zu 100 kSps/10 µs
Schnelle Reaktionen
Mithilfe von I/O-Geräten mit besonders geringer Eingangs- und Ausgangsverzögerung von <1 µs kann das Bussignal unmittelbar in das physikalische ausgegebene Signal umgewandelt werden bzw. auch umgekehrt. Zusammen mit den anderen XFC-Technologien kann so eine möglichst schnelle Signalverarbeitung innerhalb der Beckhoff Standardkomponenten erfolgen. In Verbindung mit der schnellen Feldbuskommunikation über EtherCAT und den kurzen Steuerungszyklen der leistungsstarken Beckhoff Industrie-PCs werden äußerst kurze Reaktionszeiten ermöglicht.
- Regelkreise über die Zentralsteuerung von < 50 µs sind so möglich
- Deterministisch synchronisierte Konvertierung des Eingangs- und Ausgangssignals führt zu geringerem Prozess-Timing-Jitter.
- Prozess-Timing-Jitter ist unabhängig von Kommunikations- und CPU-Jitter

Mikroinkremente
Mikroinkremente bieten bei der Auswertung von Achspositionen/Encodern die Möglichkeit, zwischen den real gezählten Encoder-Inkrementen zeitbasiert zusätzliche Inkremente zu interpolieren und somit die Ortsauflösung des Encoder-Zählwertes zu erhöhen. Intern wird die aktuelle Geschwindigkeit gemessen und die Mikroinkremente entsprechend interpoliert. Dadurch nähert sich der Encoder-Zählwert der realen Achsenposition an.
- Interpolationsauflösung von 8 Bit
- zyklisch konstante Ermittlung des Encoder-Zählwertes durch Distributed Clocks
XFC-Applikationen

Hochfrequente Laseransteuerung mit Oversampling und Timestamp
Laser werden für eine Vielzahl von Prozessen eingesetzt, die eine hohe Genauigkeit und Geschwindigkeit erfordern. Um dies zu gewährleisten, werden Laser in vielen Anwendungen mithilfe der XFC-Technologie angesteuert, indem Zeitpunkt der Laserauslösung und Ausrichtung des Laserstrahls per Distributed Clocks gekoppelt werden. Dabei ist eine hohe Aktualisierungsrate für eine schnelle und präzise Strahlführung entscheidend.
Dazu wird die digitale Ausgangsklemme mit Oversampling EL2262 eingesetzt, mit der der Laser in Intervallen von 10 µs aktiviert und deaktiviert werden kann. Die Ausrichtung des Laserstrahls erfolgt über zwei motorisch bewegliche Spiegel, die für die Position in x- bzw. y-Richtung zuständig sind. Die Positionierung der Spiegel in der gleichen Aktualisierungsrate erfolgt über ein analoges Oversampling-Stromsignal mit der EL4712 oder EL4732. So wird die synchrone Bewegung des Lasers von einer Position zur nächsten während des Ein- und Ausschaltens ermöglicht.

Kameraansteuerung mit Timestamp/Multi-Timestamp
Für die optische Kontrolle in verschiedenen Produktionsprozessen wird eine präzise Auslösung eines Kamerasystems benötigt. Dabei muss die Kamera parallel zu einer Bewegung, z. B. eines Förderbands, genau im richtigen Moment ausgelöst werden. Die Genauigkeit dieses Zeitpunkts ist von entscheidender Bedeutung für die Bildverarbeitung, kann in konventionellen Automatisierungssystemen jedoch nicht frei gewählt werden, da der Buszyklus im ms-Raster bestimmt, wann Ausgänge geschaltet werden.
Die XFC-Timestamp-Technologie wird verwendet, um zunächst die Position des abzubildenden Objekts auf dem Förderband mit einer digitalen Timestamp-Eingangsklemme mit µs-Feinheit zu bestimmen und anschließend zeitgenau die Kamera mit einer digitalen Timestamp-Ausgangsklemme auszulösen – unabhängig von Zykluszeit-Einschränkungen.

Schnelles ressourcensparendes Kleben mit Oversampling und XFC-Library
Für das gleichmäßige und ressourcensparende Setzen von Klebepunkten wird die digitale Oversampling-Ausgangsklemme EL2262 verwendet. So kann der Klebeprozess schnell durchgeführt werden, ohne durchgängig Kleber auf dem Material zu verteilen.
Mit dem Oversampling können die Geschwindigkeit des Prozessschrittes hochgehalten und gleichzeitig Klebemaße gespart werden, weil der Kleber punktuell für den optimalen Klebeprozess aufgetragen wird. Der schnell schaltende Ausgang dosiert die Klebepunkte in Abhängigkeit von der momentanen Foliengeschwindigkeit und -position, die Schaltzeitpunkte werden z. B. mit der XFC-Library TF5065 berechnet.

Strukturüberwachung mit Oversampling-Messtechnikklemmen und Distributed Clocks
Bei der Strukturüberwachung von verschiedenen Bauwerken, z. B. Windkraftanlagen, müssen viele Messwerte an unterschiedlichsten Stellen aufgenommen werden. So sind bei einer Windkraftanlage mehrere Messtechnikstationen über die Höhe des Turms verteilt. Werden die Messwerte in ein Verhältnis gebracht, kann eine Aussage zur strukturellen Integrität der gesamten Anlage getroffen werden.
Um alle Messwerte miteinander zu vergleichen, benötigen die Klemmen zur Aufnahme der Messwerte eine einheitliche Zeitbasis. Diese einheitliche Zeitbasis wird über Distributed Clocks bereitgestellt, sodass selbst mit Oversampling hochfrequent abgetastete Messwerte in die Strukturüberwachung einbezogen werden können.

Erstellung von Kraft-Weg-Diagrammen in Stanzvorgängen mithilfe von synchroner Oversampling-Messtechnik
Für die Überwachung einiger Prozesse ist das Aufnehmen von Kraftverläufen von hoher Bedeutung. Soll der Kraftverlauf in Abhängigkeit von der Position einer Stanzvorrichtung dargestellt werden, ist eine zeitliche Koordination zwischen den Messwerten notwendig.
Diese Koordination wird durch die gemeinsame Zeitbasis von Distributed Clocks bereitgestellt. Zusätzlich muss die Abtastrate der Auswertung von Kraftaufnehmer und Inkrement-Encoder gleich sein. Damit bei schnellen Stanz-/Pressvorgängen trotzdem ein hoch aufgelöster Kraft-Weg-Verlauf aufgenommen werden kann, wird Oversampling verwendet.
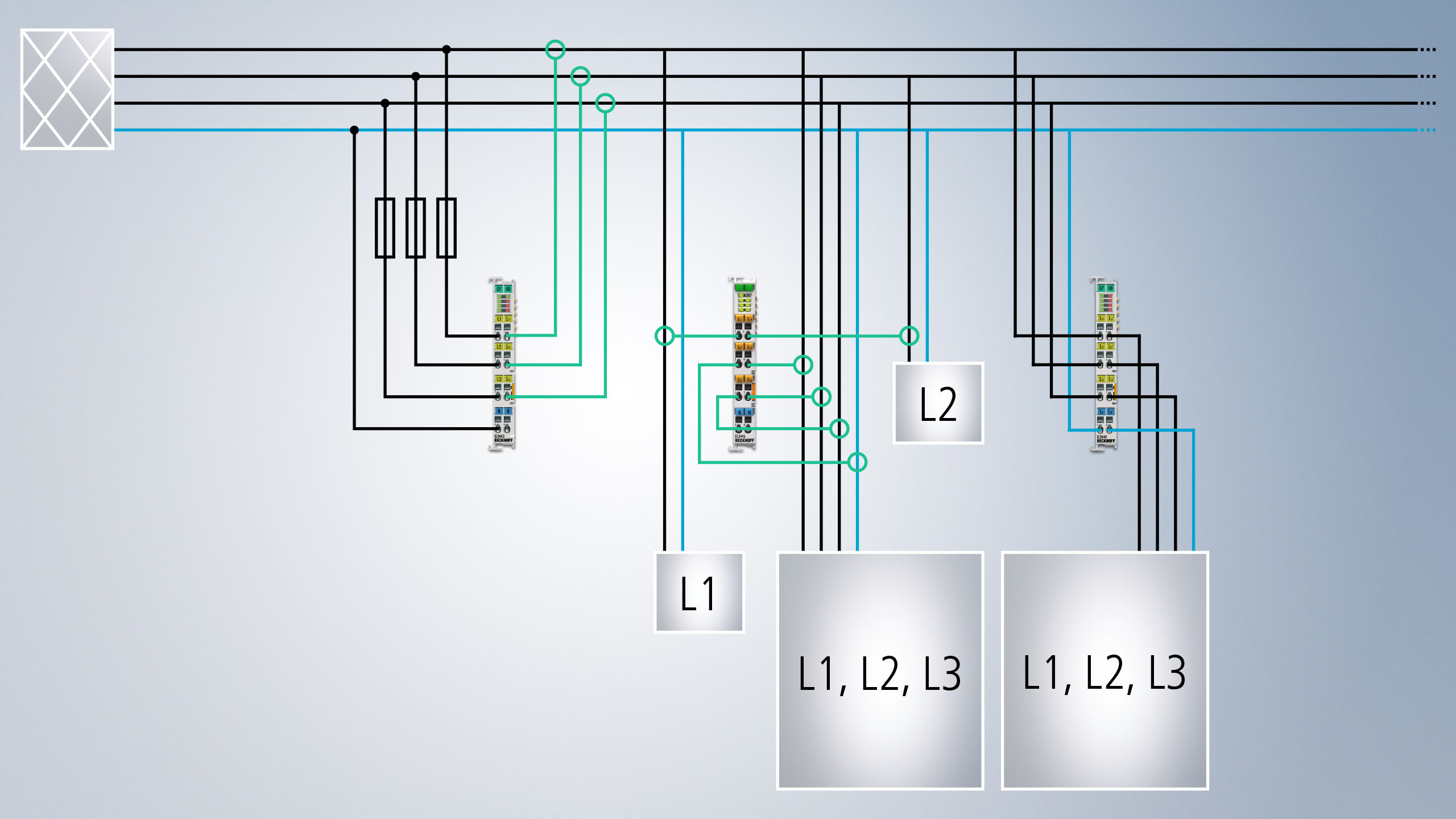
Leistungsberechnung aus verteilten Strom- und Spannungsmessungen
Bei der Überwachung elektrischer Leistung müssen Strom und Spannung häufig an unterschiedlichen Punkten eines Verteilnetzes erfasst werden. Damit aus der örtlich getrennten Messung von Strom und Spannung verlässliche Leistungsdaten gewonnen werden können, ist eine hochpräzise zeitliche Synchronität erforderlich. Distributed Clocks in den Leistungsmessklemmen sorgen für diese Synchronität. So können mehrere Leistungsmessklemmen flexibel verteilt werden und dennoch auf eine zentrale, zeitlich hochgenau synchronisierte Spannungsreferenz im EtherCAT-System zugreifen, z. B. aus der EtherCAT-Klemme EL3443. Dadurch ist es möglich, vollständige Leistungsdaten mit reinen Strommessklemmen wie der EL3446 zu erhalten. Dies reduziert den notwendigen Verdrahtungsaufwand erheblich und spart Zeit und Geld.
Applikationsberichte
-
 Applikationsbericht
ApplikationsberichtAdvanced Packaging bei 3D-Strukturen im Mikrometerbereich
Fonontech, Niederlande
Elektronikkomponenten und deren Strukturen werden immer kleiner und damit deren Kontaktierung umso schwieriger. Herkömmliche Verfahren stoßen längst an ihre Grenzen, das Impulse Printing™-Verfahren des niederländischen Start-ups Fonontech nicht. Es ermöglicht Advanced Packaging von Halbleitern in 3D-Strukturen im Mikrometerbereich. Zentrale Bestandteile des Verfahrens sind die XFC-Technologie von Beckhoff und EtherCAT.
-
 Applikationsbericht
ApplikationsberichtGenaue und schnelle Daten sind entscheidend für die notwendige Synchronisation in Windparks
Pulse, Großbritannien
Großbritannien hat sich zum Ziel gesetzt, bis 2030 genügend Windparks zu errichten, um jeden Haushalt mit Strom versorgen zu können. Das Potenzial der Windkraft wurde jüngst durch einen Rekord demonstriert: An einem einzigen Tag im Januar produzierten Windparks 19.835 MW Energie. Dies reicht aus, um mehr als die Hälfte des Strombedarfs Englands zu decken. Die verstärkten Investitionen in erneuerbare Energien sind unabdingbar, um das für 2050 angestrebte Ziel „Netto-Null-Emission“ zu erreichen. Pulse Structural Monitoring Ltd, ein Unternehmen der Acteon-Gruppe, wurde mit der Überwachung ausgewählter Turbinenfundamente in neuen Windparks beauftragt – durchgängig realisiert mit Beckhoff-Technik und insbesondere den EtherCAT-Messtechnikklemmen.
-
 Applikationsbericht
ApplikationsberichtModularisierte Handtuchproduktion erfordert flexible und kompakte Steuerungs- und Antriebstechnik
Texpa, Deutschland
Die Texpa Maschinenbau GmbH & Co. KG, in Saal an der Saale, ist spezialisiert auf Nähtransferstraßen zur Konfektionierung von Heimtextilien sowie auf Maschinen für das verkaufsgerechte Falten der Textilien. Um diese effizient kundenspezifisch anpassen und schnell entwickeln zu können, setzt das mittelständische Unternehmen konsequent auf die Modularisierung der Anlagen. Das Beispiel einer neuen Konfektionieranlage für Frottierhandtücher verdeutlicht, wie wichtig hierfür die Systemoffenheit, Flexibilität und kompakte Bauform der PC- und EtherCAT-basierten Steuerungs- und Antriebstechnik von Beckhoff ist.
-
 Applikationsbericht
ApplikationsberichtSchnelle und hochpräzise Messtechnik erkennt Gurtschäden für Fördergurte in Industrie und Bergbau bereits im Ansatz
Continental Engineering Services GmbH, Deutschland
Schnelle und hochpräzise Messtechnik erkennt Gurtschäden bereits im Ansatz.
-
 Applikationsbericht
ApplikationsberichtHochgenaue Frequenzmessung durch XFC-Klemme: 12-MW-Energiespeichersystem übernimmt Frequenzregelung
POWER21 Corp., Republik Korea
Um Netzschwankungen entgegenzuwirken, hat das koreanische Ingenieurbüro Power21 ein 12-MW-Energiespeichersystem zur Frequenzregelung entwickelt. Die hochgenaue Frequenzmessung erfolgt über die XFC-Klemmen EL3773.
-
 Applikationsbericht
ApplikationsberichtExtrem schnelle und hochpräzise Datenkommunikation für modernste Drucktechnik
WIFAG-Polytype Holding AG, Schweiz
Auf der Grundlage von EtherCAT und XFC entwickelt Wifag eine industrietaugliche Ansteuerelektronik für handelsübliche Tintenstrahl-Druckköpfe.
-
 Applikationsbericht
ApplikationsberichtHighspeed und Präzision softwaregesteuert im Einklang
Ponticon GmbH, Deutschland
Laserauftragschweißen kommt heute oft bei der Beschichtung rotationssymmetrischer Bauteile zum Einsatz. Mit der pE3D-Anlage erweitert die Ponticon GmbH, Wiesbaden, das Einsatzspektrum um die Beschichtung und Additive Fertigung beliebiger Geometrien. Ohne TwinCAT CNC, EtherCAT und die eXtreme Fast Control Technology (XFC) von Beckhoff wären die Anforderungen an die präzise Ansteuerung und Koordination von Tripod, Dreh-/Schwenktisch und Laser nur schwer zu realisieren gewesen.
-
 Applikationsbericht
ApplikationsberichtSystemintegrierte Schwingungsanalyse überwacht zuverlässig die Tragfähigkeit von Stahlkonstruktionen
Aoling und CNOOC, China
Eine verlässliche Energieversorgung ist für jede Industrienation essenziell. Deshalb legt Chinas größter Öl- und Gas-Produzent CNOOC großen Wert auf die Überwachung seiner Offshore-Plattformen. Ziel der entsprechenden, von Tianjin Aoling Industrial Automation Technologies Co., Ltd. (Aoling) umgesetzten Initiative zur Kontrolle der tragenden Konstruktionen ist, anhand von Schwingungsanalysen zuverlässige Vorhersagen zur Tragfähigkeit treffen zu können. Die chinesischen Spezialisten setzen dabei auf PC-based Control und die präzise, systemintegrierte Messtechnik von Beckhoff.
-
 Applikationsbericht
ApplikationsberichtHochgenaue Steuerungstechnik senkt den Rohstoffverbrauch beim Kunststoff-Spritzgießen
Husky Injection Molding Systems Ltd., Kanada
Ein beträchtlicher Anteil am Weltmarkt für PET-Kunststoffflaschen basiert auf Vorformlingen, die mit Maschinen der kanadischen Husky Injection Molding Systems Ltd. produziert werden.
-
 Applikationsbericht
ApplikationsberichtMit EtherCAT-Analog-Klemmen effizient Messdaten zum Test von Lenkeinheiten erfassen
Akka DNO GmbH und ZF Friedrichshafen AG, Deutschland
Die Lenkung ist bei einem Fahrzeug eines der wichtigsten sicherheitsrelevanten Elemente. Dementsprechend hohe Anforderungen werden schon an die entwicklungsbegleitende Systemprüfung gestellt. Die Kölner Akka DNO GmbH hat daher gemeinsam mit der ZF Friedrichshafen AG ein leistungsfähiges Hardware-in-the-Loop-Prüfsystem entwickelt, das die erforderlichen Messdaten über die in PC-based Control direkt integrierte Messtechnik von Beckhoff erfasst.









