Beckhoff products with XFC technology meet the requirements of applications that demand fast control, short response times, and deterministic control in the microsecond range. The technology includes EtherCAT as fieldbus communication, high-performance industrial PCs, I/O products such as IP20 terminals and IP67 box modules, and the flexible TwinCAT automation software.
XFC technology offers significant advantages through finer time resolutions for precision-critical processes. The optimized control architecture and integration of various forms of sub-technology enable response times of well under 100 microseconds. This allows highly dynamic and time-discrete processes to be implemented with excellent precision and reliability – even with standard components.
XFC technology comprises the following forms of sub-technology from various product areas: distributed clocks, timestamp/multi-timestamp, oversampling, fast inputs and outputs in the sub-microsecond range, and microincrements. These forms of sub-technology play a key role in ensuring the high performance and accuracy of the XFC systems.
XFC technologies in detail

Distributed clocks
Distributed clocks create a uniform time base across all bus devices, which is essential for time-critical processes and enables precise coordination of events across different components. This decouples the control actions from the control/bus cycle and makes them freely movable on the time axis. Distributed clocks optimize the performance and reliability of industrial applications by enabling time-deterministic acquisition and output of signals. With their uniform time base, distributed clocks provide the basis for all other XFC technology.
- distributed absolute system synchronization for unlimited CPUs, I/Os, and drive units
- internal time resolution: 10 ns
- distributed clocks accuracy: << 1 µs
- syncing with other time systems (external synchronization capabilities)

Timestamp
Timestamp/multi-timestamp offers the option of processing the uniform distributed clocks system time as a data type. This technology enables precise recording of timestamps for events in real time. Timestamp allows digital and analog events to be recorded and outputs to be set independently of the bus cycle. This allows multiple drive axes to be precisely synchronized with each other and with the system time, for instance. In contrast to timestamp, multi-timestamp allows several switch results to be processed per PLC cycle.
- timestamp
- high-precision time measurement for digital individual events per cycle: resolution 1 ns, internal sampling in the ns range
- absolute distributed clocks time with 64-bit resolution, simple time handling of > 580 years
- multi-timestamp
- precision time measurement of up to 32 events per cycle: resolution 1 ns, internal sampling in the µs range
- distributed clocks time with 32-bit resolution, sufficient for actions in a time range of ±4 seconds

Oversampling
Oversampling allows higher sampling rates to be implemented on the device side without changing the PLC cycle. This involves taking multiple samples per bus cycle at time-equidistant intervals, and one package of measurement data is transmitted. The high sampling frequencies allow signals to be captured with a higher time resolution and for higher-frequency signals to be recorded compared to the standard evaluation (1 measurement per bus/control cycle). The usual way to detect such signals would be to reduce the cycle time, but this is limited by practical constraints on the control system. For oversampling outputs, higher control frequencies can be implemented compared to the cycle, so that multiple control commands can be issued per bus/control cycle.
- support for analog I/O EtherCAT Terminals (as of 2024): signal conversion up to 100 ksps/10 µs
- support for digital I/O EtherCAT Terminals (as of 2024): up to 10 Msps/100 ns
- support for angle/displacement measurement (as of 2024): up to 100 ksps/10 µs
Fast reactions
Using I/O devices with a particularly low input and output delay of <1 µs, the bus signal can be converted directly into the physical output signal or vice versa. Together with the other XFC technologies, this enables the fastest possible signal processing within the Beckhoff standard components. In connection with the fast fieldbus communication via EtherCAT and the short control cycles of the high-performance Beckhoff Industrial PCs, extremely short response times can be achieved.
- control loops via the central controller of < 50 µs are possible
- deterministically synchronized conversion of the input and output signal leads to reduced process timing jitter
- process timing jitter is independent of communication and CPU jitter

Microincrements
When evaluating axis positions/encoders, microincrements offer time-based interpolation of additional increments between the real counted encoder increments, which increases the spatial resolution of the encoder count value. The current speed is measured internally and the microincrements are interpolated accordingly. This brings the encoder count value closer to the real axis position.
- interpolation resolution of 8 bits
- constant cyclic determination of the encoder count value by distributed clocks
XFC applications

High-frequency laser control with oversampling and timestamp
Lasers are used for a variety of processes that require high accuracy and speed. To ensure this, lasers are controlled in many applications using XFC technology by coupling the time of laser triggering and the alignment of the laser beam via distributed clocks. A high update rate is crucial for guiding the beam quickly and precisely.
The EL2262 digital output terminal with oversampling is used for this purpose, with which the laser can be activated and deactivated at intervals of 10 µs. The laser beam is aligned via two motorized movable mirrors, which are responsible for positioning in the x and y directions. The mirrors are positioned at the same update rate via an analog oversampling current signal with the EL4712 or EL4732. This enables the laser to move synchronously from one position to the next during switch-on and off.

Camera control with timestamp/multi-timestamp
The precise triggering of a camera system is required for visual inspection in various production processes. The camera must be triggered at exactly the right moment in parallel with the movement of a conveyor belt, for example. The accuracy of this timing is crucial for image processing, but cannot be freely selected in conventional automation systems – the bus cycle in the ms grid determines when outputs are switched.
XFC timestamp technology is used to first determine the position of the object to be imaged on the conveyor belt with a digital input terminal with µs precision and then trigger the camera with a digital timestamp output terminal at the exact time – regardless of cycle time restrictions.

Fast, resource-saving gluing with oversampling and XFC library
The EL2262 digital oversampling output terminal is used for the uniform and resource-saving placing of glue dots. This allows the bonding process to be carried out quickly without having to spread glue all over the material.
With oversampling, the process step speed is kept high. At the same time, glue quantities are reduced because the glue is applied selectively for the optimum bonding process. The fast switching output dispenses the glue dots depending on the current film speed and position; the switching times are calculated using the XFC library TF5065, for example.

Structural monitoring with oversampling measurement terminals and distributed clocks
When monitoring structures such as wind turbines, many measured values have to be recorded at different points. In the case of wind turbines, for example, several measurement technology stations are distributed over the height of the tower. If the measured values are brought into a relationship, a statement can be made about the structural integrity of the entire system.
To compare all measured values with each other, the terminals require a uniform time base for recording the measured values. Distributed clocks are used to provide this uniform time base. This means that even measured values sampled at a high frequency with oversampling can be included in the structural monitoring.

Creating force-displacement diagrams in punching processes using synchronous oversampling measurement technology
Recording force curves is very important for monitoring certain processes. If the force curve is to be displayed as a function of the position of a punching machine, temporal coordination is required between the measured values.
This coordination is provided by the common time base of distributed clocks. Furthermore, the evaluation sampling rate of the force transducer and incremental encoder must be the same. Oversampling is used to ensure that a high-resolution force-displacement curve can still be recorded during fast punching/pressing processes.
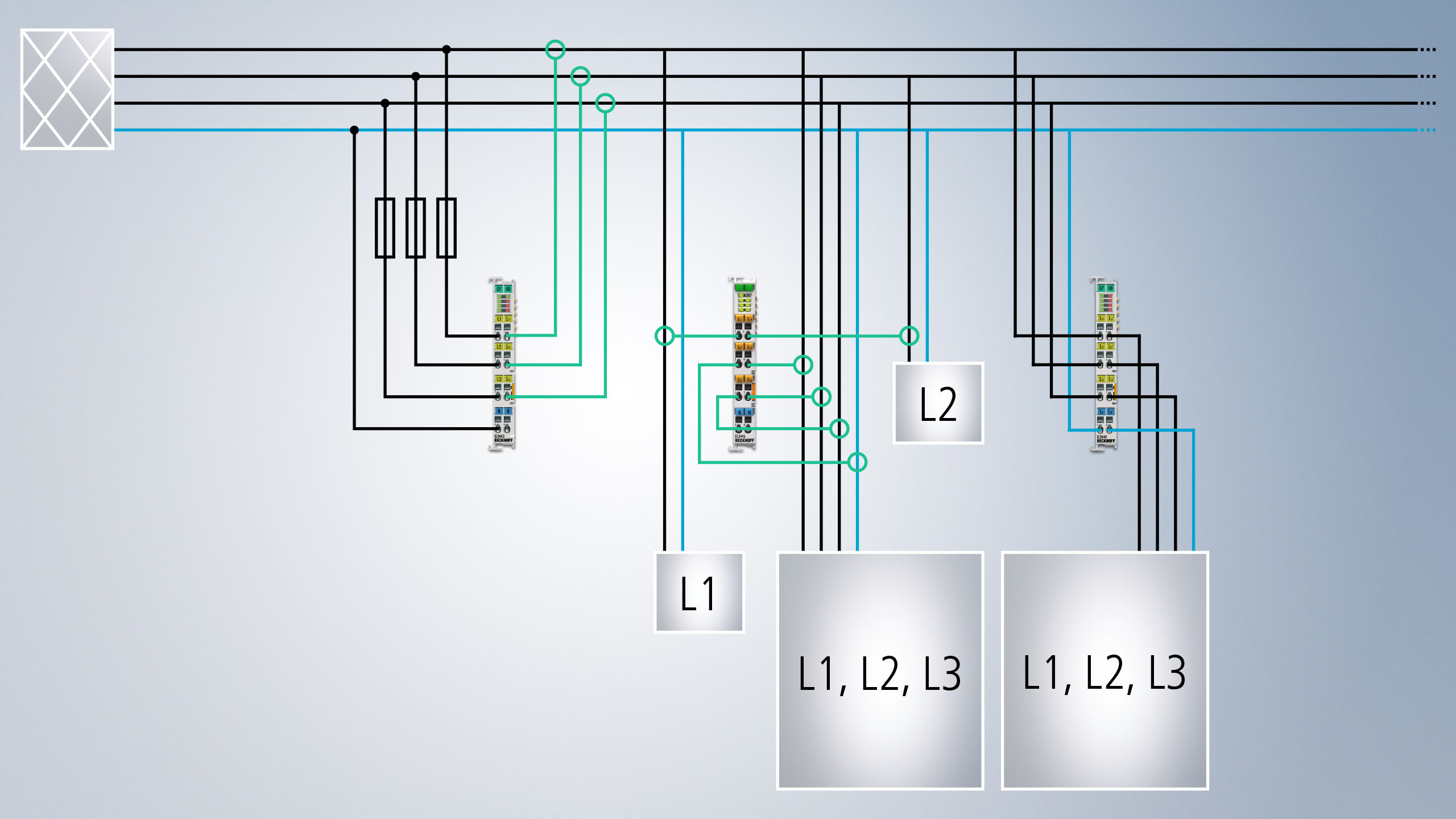
Calculate power from distributed current and voltage measurement
When we monitor electrical power, current and voltage often have to be measured at different locations in the distribution grid. High-precision time synchronization is needed in order to obtain reliable power data from these spatially separated current and voltage measurements. Distributed clocks in the power measurement terminals ensure this time synchronization. This means that several power measurement terminals can be flexibly distributed and still access a central voltage reference that is synchronized with high precision in the EtherCAT system, e.g. from the EL3443 EtherCAT Terminal. This allows pure current measurement terminals such as the EL3446 to provide complete power data. This significantly reduces the amount of wiring work required and saves time and money.
Application reports
-
 Application report
Application reportAdvanced packaging for 3D structures in the micrometer range
Fonontech, Netherlands
Electronic components and their structures are becoming smaller and smaller, making it all the more difficult to bond them. Conventional processes have long since reached the limits of what they can do in this area, but the Impulse Printing™ process developed by Dutch start-up Fonontech is bringing something new. It enables advanced packaging of semiconductors in 3D structures in the micrometer range. XFC technology components from Beckhoff and EtherCAT are key in this process.
-
 Application report
Application reportAccurate and fast data are crucial for the essential synchronization in wind farms
Pulse, United Kingdom
The UK aims to build enough wind farms to power every household by 2030. The potential of wind power was demonstrated by a recent record, when on a single day in January wind farms produced 19,835 megawatts, which is enough to cover more than half of England’s electricity needs. The increased investment in renewable energy will be essential to hit the 2050 goal of Net Zero. Pulse Structural Monitoring Ltd, an Acteon company, have been tasked with monitoring selected turbine foundations in new wind farms, the solution is delivered by using Beckhoff technology and EtherCAT measurement terminals in particular throughout the design.
-
 Application report
Application reportModular towel production lines require flexible and compact control and drive technology
Texpa, Germany
Texpa Maschinenbau GmbH & Co. KG in Saal an der Saale, Germany, specializes in transfer sewing lines for home textiles as well as in plaiting machines. To best adapt these machines to the customer’s requirements, the mid-sized company has made its systems as modular as possible. Texpa’s new manufacturing system for terrycloth towels signifies the importance of the openness, flexibility and compact design of PC- and EtherCAT-based control and drive technology from Beckhoff for these applications.
-
 Application report
Application reportFast, high-precision measurement technology provides early detection of belt damage for conveyor belts in industry and mining
Continental Engineering Services GmbH, Germany
Fast, high-precision measurement technology provides early detection of belt damage.
-
 Application report
Application reportHigh-precision frequency measurement with eXtreme Fast Control technology in a 12 MW energy storage system
POWER21 Corp., Republic of Korea
In order to protect against grid fluctuations, Korean engineering firm, Power21 has developed an Energy Storage System (ESS) for frequency control. EL3773 EtherCAT Terminals with eXtreme Fast Control (XFC) technology perform high-precision frequency measurements.
-
 Application report
Application reportExtremely fast, highly precise data communication for state-of-the-art printing applications
WIFAG-Polytype Holding AG, Switzerland
Based on EtherCAT and XFC technologies, Wifag developed industrial-strength control electronics for a wide range of commercial inkjet print heads.
-
 Application report
Application reportHigh speed and precision perfectly aligned in software-controlled solution
Ponticon GmbH, Germany
Today, laser cladding is often used for coating rotationally symmetrical components. Ponticon GmbH, based in Wiesbaden, Germany, is expanding its range of applications to include coating and additive manufacturing of any geometries with the pE3D system. The requirements regarding the precise control and coordination of the tripod, rotary/swivel table, and laser would have been difficult to implement without TwinCAT CNC, EtherCAT, and eXtreme Fast Control Technology (XFC) from Beckhoff.
-
 Application report
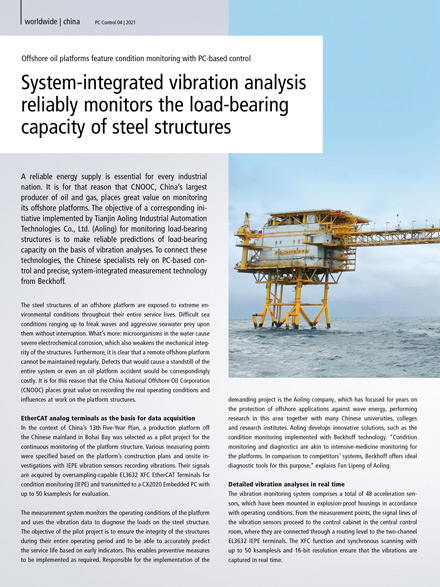
Application reportSystem-integrated vibration analysis reliably monitors the load-bearing capacity of steel structures
Aoling and CNOOC, China
A reliable energy supply is essential for every industrial nation. It is for that reason that CNOOC, China’s largest producer of oil and gas, places great value on monitoring its offshore platforms. The objective of a corresponding initiative implemented by Tianjin Aoling Industrial Automation Technologies Co., Ltd. (Aoling) for monitoring load-bearing structures is to make reliable predictions of load-bearing capacity on the basis of vibration analyses. To connect these technologies, the Chinese specialists rely on PC-based control and precise, system-integrated measurement technology from Beckhoff.
-
 Application report
Application reportHigh-precision control technology lowers consumption of raw materials in injection molding machines
Husky Injection Molding Systems Ltd., Canada
An enormous share of the global market for PET plastic bottles is based on preforms manufactured using machines built by the Canadian plastics industry innovator, Husky Injection Molding Systems Ltd.
-
 Application report
Application reportEfficient acquisition of measurement data via EtherCAT analog terminals in steering unit testing
Akka DNO GmbH und ZF Friedrichshafen AG, Germany
Reliable steering is one of any vehicle’s most important safety-relevant elements. Correspondingly high demands are placed on system testing that accompanies the development process. Together with ZF Friedrichshafen AG, the Cologne, Germany-based Akka DNO GmbH has therefore developed a high-performance Hardware-in-the-Loop test system that acquires necessary data via high-end measurement technology directly integrated in PC-based control technology from Beckhoff.









